Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Классификация полупроводниковых преобразователейСодержание книги Поиск на нашем сайте
Классификация полупроводниковых преобразователей
Преобразовательная техника (энергетическая электроника) – дисциплина, изучающая принципы действия и особенности преобразователей электрической энергии(преобразовательных устройств), применяемых в электроприводе, электрической тяге, электротермии, электротехнологии, электроэнергетике и т.д. Преобразовательное устройство предназначено для управления потоком электрической энергии (видом, количеством, качеством), подводимой из сети, с целью регулирования режимов работы различных электротехнических устройств. Управление - это регулирование по требуемому закону одной или нескольких координат (напряжение, ток, ЭДС). Различают два способа управления: - параметрический – это способ управления посредством изменения параметров цепей (активных и реактивных сопротивлений и т.п.). Характеризуется, как правило, низким КПД и дискретностью; - энергетический – это способ управления посредством регулирование количества и качества подводимой электрической энергии. В любом полупроводниковом преобразователе (ПП), как правило, можно выделить две части (рис. 1): - силовую часть, в которой осуществляются все основные энергетические преобразования и передача энергии от первичного источника к потребителю; - систему управления, в которой формируются сигналы управления работой силовых регулирующих элементов.
Структурная схема ПП

Принципы работы полупроводниковых преобразователей
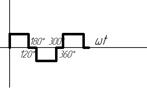
Автономный инвертор (АИ) – это устройство, предназначенное для преобразования энергии постоянного тока в энергию переменного, регулируемую по амплитуде, частоте, а возможно и фазе, при постоянном напряжении источника. Принцип преобразования заключается в периодической смене полярности на нагрузке (периодическом подключении нагрузки к разнополярным источникам питания). При этом в статическом режиме длительности подключения к отрицательной и положительной шинам должны быть равны. Период первой гармонической составляющей на выходе преобразователя задается периодом переключения полярности. Варианты формирования выходного напряженияАИ приведены на рис. 5.
Варианты формирования выходного напряженияАИ
Рис. 5. а – прямоугольной формы с длительностью на 180 электронных градусов; б - с длительностью импульса 120 эл. градусов, длительность паузы – 60 эл. градусов; в - прямоугольной формы с использованием ШИР; г - с использованием ШИМ
Достоинством второго варианта является то, что в выходном напряжении отсутствуют гармоники кратные трем. Широтно-имульсное регулирование (ШИР) применяется для регулирования амплитуды выходного напряжения (рис. 5, в). При этом амплитуда первой гармонической составляющей выходного напряжения будет пропорциональна длительности импульса ШИР. Широтно-импульсная модуляция (ШИМ) используется для приближения выходного напряжения к синусоидальному (рис. 5, г). При необходимости формирования многофазной системы выходного напряжения используют инверторы соответствующей фазности. Простейший многофазный инвертор - это сумма однофазных инверторов, работающих при едином управлении, обеспечивающем требуемый сдвиг фаз многофазной системы.
Выпрямитель - это электротехническое устройство, предназначенное для преобразования энергии переменного тока в энергию постоянного тока. Выпрямители делятся на неуправляемые, которые осуществляют только преобразование знака напряжения, и управляемые, которые преобразуют не только знак, но и уровень напряжения. Выходное напряжение однофазного неуправляемого выпрямителя имеет вид, приведенный на рис.6, а.
Искусственная коммутация. Импульсные преобразователи постоянного напряжения Принципы регулирования
Импульсные преобразователи постоянного напряжения – это устройство, предназначенное для питания нагрузки постоянного напряжения отличного от напряжения источника. Выходное напряжение импульсного преобразователя представляет собой последовательность прямоугольных импульсов. Амплитуда импульсов близка к ЭДС источника. Выходное напряжение на нагрузке определяется средним значением импульсного напряжения. Требуемое качество выходного напряжения добивается путем включения фильтрующих элементов. В основе преобразователей данного типа лежит ключевой режим работы мощных полупроводниковых приборов, для которых характерно малое падение напряжения на открытом p-n-переходе, что приводит к высокому КПД данных устройств. Основные элементы транзисторы, тиристоры. Там, где применяется тиристор, неизбежно встает вопрос о его запирании в цепи постоянного тока. Для запирания используются внешние накопители электрической энергии (конденсаторы). Коммутация тиристоров с помощью внешнего накопителя энергии называется искусственной. Применение в качестве фильтрующих элементов сглаживающих реакторов позволяет запасать в них энергию и поддерживать за счет нее непрерывный ток нагрузки на интервале паузы. Чтобы возникнувшая при этом ЭДС индукции не выводила из строя p-n-переходы создается контур для замыкания реактивной составляющей тока с помощью обратных диодов. Для сокращения габаритов преобразователя и индуктивности реактора необходимо максимально повышать частоту коммутации. Регулирование среднего напряжения на нагрузке достигается за счет широтно-импульсного метода, частотно-импульсного метода и их совместного применения.
Широтно-импульсный метод регулирования (ШИР) осуществляется изменением длительности (ширины) выходных импульсов tи (рис. 3, а) при неизменном периоде их следования (Т=const, частота f=1/T=const). Среднее значение выходного напряжения преобразователя при широтно-импульсном регулировании связано с напряжением питания соотношением
где
Принципы импульсного регулирования
а) б) Рис. 3. ШИР (а) и ЧИР (б)
В соответствии с (1) диапазон регулирования выходного напряжения ИППН с ШИР составляет от нуля (tи = 0, При частотно-импульсном методе регулирования (ЧИР) изменение выходного напряжения производится за счет изменения частоты следования выходных импульсов (f=1/Т=var, рис. 3, б) при неизменной их длительности (tи=const). Регулировочные возможности преобразователя характеризуются соотношением
Выходному напряжению, равному E, здесь соответствует предельная частота следования импульсов, равная 1/tи, а нулевому выходному напряжению - нулевая частота f Совместное использование ШИР и ЧИР (комбинированное регулирование) заключается в изменении двух параметров выходных импульсов: tи и f. Выходное напряжение ППН
В основе схем ППН лежат пары встречно-параллельных включённых тиристоров, момент подачи управляющих импульсов у которого сдвигается относительно точки естественной коммутации на угол управления a (рис.15). В итоге, действующее значение напряжения нагрузки, уменьшается. В напряжении появляются высшие гармонические составляющие. Спектральный состав напряжения нагрузки тем хуже, чем больше задержка открытия.
При работе на активно-индуктивную нагрузку тиристор остаётся проводящим на интервале от a до p+d, где d - сдвиг момента перехода тока через ноль относительно перехода через ноль напряжения. Зона прерывистого тока (зона регулирования) сужается до размеров a-d, от куда логически следует вывод: о невозможности регулирования при aЈd, такой регулятор эффективен в основном на нагрузке с достаточно большим COSj. Трёхфазные схемы ТРПН (рис.15д) строятся на базе элементарных пар. При построении диаг рамм напряжений на нагрузке необходимо учитывать характер схемы и сдвиг фаз. Регулировочная характеристика:
Уравнение движения ЭП. Причинами возникновения переходных режимов в электроприводах является либо изменение нагрузки, связанное с производственным процессом, либо воздействие на электропривод при управлении им, т.е. пуск, торможение, изменение направления вращения и т.п. Переходные режимы в электроприводах могут возникнуть также в результате аварий или нарушения нормальных условий электроснабжения (например, изменения напряжения или частоты сети, несимметрия напряжения и т.п. Уравнение движение электропривода должно учитывать все силы и моменты, действующие в переходных режимах. При поступательном движении движущая сила F всегда уравновешивается силой сопротивления машины В соответствии с изложенным уравнение равновесия сил при поступательном движении записывается так:
Аналогично уравнение равновесия моментов,
Уравнение (2.23) показывает, что развиваемый двигателем момент М уравновешивается моментом сопротивления Из анализа (2.23) видно: 1) при 2) при 3) при Вращающий момент, развиваемый двигателем при работе, принимается положительным, если он направлен в сторону движения привода. Если он направлен в сторону обратную движению, то он считается отрицательным. Знак минус перед При спуске груза, раскручивании или разжатии пружины и т.п. перед При учете сказанного о знаках моментов формула (2.23) соответствует работе двигателя в двигательном режиме при реактивном моменте сопротивления. В общем виде уравнение движения привода может быть записано следующим образом:
Выбор знаков перед значениями моментов в (2.23а) зависит от режима работы двигателя и характера моментов сопротивления.
При выводе уравнений для статистических характеристик двигателя примем следующие допущения; реакция якоря не учитывается; момент на валу двигателя равен электромагнитному моменту. Тогда уравнения для напряжения, ЭДС якоря и электромагнитного момента будут иметь вид
где к= Из предыдущих формул-U и Е получаем формулу для электромеханической характеристики
Формулу для механической характеристики получим с использованием выражения – М
2. Естественной - называется механическая характеристика двигателя, которая соответствует основной схеме включения двигателя, номинальным параметрам питающего напряжения и отсутствию в электрических цепях двигателя дополнительных элементов. ω
0 3 2 М Характеристики наиболее распространенных двигателей вращательного движения; 1. Д. Постоянного тока независимого возбуждения; 2. Д. Постоянного тока последовательного возбуждения; 3. А.Д.; 4. С.Д. Жесткость естественной характеристики зависит от внутреннего сопротивления якорной цепи двигателя
Регулирование скорости АД. Показатели Для количественной оценки и сопоставления различных способов регулирования скорости используются следующие показатели. Диапазон регулирования скорости, определяемый отношением максимальной скорости к минимальной, т.е. D= Wmax/ Диапазон регулирования будет определяться отношением Wном/W ипри заданном моменте нагрузки Мс. Стабильность скорости, характеризуемая изменением скорости при возможных колебаниях момента нагрузки на валу двигателя и определяемая жесткостью его механических характеристик. Чем она больше, тем стабильнее скорость при изменениях момента нагрузки, и наоборот. В рассматриваемом примере большая стабильность обеспечивается при искусственной характеристике 3. Плавность регулирования скорости, определяемая перепадом скорости при переходе с одной искусственной характеристики на другую. Чем больше в заданном диапазоне регулирования скорости может быть получено искусственных характеристик, тем плавнее будет происходить регулирование скорости. Направление регулирования скорости. В зависимости от способа воздействия на двигатель и вида получаемых искусственных характеристик его скорость может увеличиваться или уменьшаться по сравнению с работой на естественной характеристике данном моменте нагрузки. В первом и М случае говорят о регулировании скорости вверх от основной характеристики, во втором - вниз. Можно сказать, что регулирование скорости вверх связано с получением искусственных механических характеристик, располагающихся выше естественной, а регулирование скорости вниз обеспечивается характеристиками, располагающимися ниже естественной. Допустимая нагрузка двигателя. Электрический двигатель рассчитывается и проектируется таким образом, чтобы, работая на естественной характеристике с номинальными скоростью, током, моментом и мощностью, он не нагревался выше определенной температуры, на которую рассчитана его изоляция. В этом случае срок его службы является нормативным и составляет обычно 15...20 лет. Поскольку потери энергии при нагреве двигателя пропорциональны квадрату тока, нормативный нагрев будет иметь место при протекания номинального тока в нем. Отметим при этом, что нагрев определяется также и условиями охлаждения (вентиляции) двигателя. При регулировании скорости двигатель работает уже на искусственных характеристиках, т.е. при отличных от паспортных условиях. Поэтому для сохранения его нормативного нагрева и тем, самым расчетного срока службы нагрузка двигателя (при расчетных условиях его охлаждения) может быть только такой, при которой в нем протекает ток не выше номинального. Именно такая нагрузка и называется допустимой. Все способы регулирования скорости делятся по этому признаку на две группы, для одной из которых характерна допустимая 4 нагрузка, равная номинальному моменту, а для другой - равная номинальной мощности двигателя. При правильном выборе способа регулирования скорости двигатель полностью используется в соответствии со своими возможностями во всем диапазоне ее изменения. Экономичность регулирования скорости. Получение одних и тех же показателей (диапазона, стабильности, плавности и т.д.) можно обеспечить с помощью различных ЭП и способов регулирования их скорости. Для выбора наиболее рационального вида регулируемого ЭП используются различные технико-экономические показатели - капитальные затраты на его реализацию, эксплуатационные расходы, срок окупаемости, надежность, удобство и простота в эксплуатации, серийность и унификация средств управления и др. Оценка или сопоставление экономических показателей проводится при выборе возможных способов регулирования скорости данного ЭП (или различных ЭП). В результате анализа всех возможных вариантов выявляется экономически обоснованное решение.
Классификация полупроводниковых преобразователей
Преобразовательная техника (энергетическая электроника) – дисциплина, изучающая принципы действия и особенности преобразователей электрической энергии(преобразовательных устройств), применяемых в электроприводе, электрической тяге, электротермии, электротехнологии, электроэнергетике и т.д. Преобразовательное устройство предназначено для управления потоком электрической энергии (видом, количеством, качеством), подводимой из сети, с целью регулирования режимов работы различных электротехнических устройств. Управление - это регулирование по требуемому закону одной или нескольких координат (напряжение, ток, ЭДС). Различают два способа управления: - параметрический – это способ управления посредством изменения параметров цепей (активных и реактивных сопротивлений и т.п.). Характеризуется, как правило, низким КПД и дискретностью; - энергетический – это способ управления посредством регулирование количества и качества подводимой электрической энергии. В любом полупроводниковом преобразователе (ПП), как правило, можно выделить две части (рис. 1): - силовую часть, в которой осуществляются все основные энергетические преобразования и передача энергии от первичного источника к потребителю; - систему управления, в которой формируются сигналы управления работой силовых регулирующих элементов.
Структурная схема ПП
|
||||||||
|
|
Последнее изменение этой страницы: 2016-07-14; просмотров: 1645; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.119 (0.008 с.) |





 = tи/T - коэффициент регулирования (преобразования).
= tи/T - коэффициент регулирования (преобразования).


 0.
0.


 и инерционной силой
и инерционной силой  возникающей при изменениях скорости. Если масса тела
возникающей при изменениях скорости. Если масса тела  выражена в килограммах, а скорость
выражена в килограммах, а скорость  - в метрах в секунду, то сила инерции, как и другие силы, действующие в рабочей машине, измеряются в ньютонах
- в метрах в секунду, то сила инерции, как и другие силы, действующие в рабочей машине, измеряются в ньютонах 
 (2.22)
(2.22) для вращательного движения имеет следующий вид:
для вращательного движения имеет следующий вид: (2.23)
(2.23) на его валу и инерционным или динамическим моментом
на его валу и инерционным или динамическим моментом  В (2.22) и (2.23) принято, что масса тела
В (2.22) и (2.23) принято, что масса тела  и соответственно момент инерции привода J является постоянными, что справедливо для значительного числа производственных механизмов.
и соответственно момент инерции привода J является постоянными, что справедливо для значительного числа производственных механизмов. т.е. имеет место ускорение привода;
т.е. имеет место ускорение привода; т.е. имеет место замедление привода;
т.е. имеет место замедление привода; в данном случае привод работает в установившемся режиме.
в данном случае привод работает в установившемся режиме. указывает на тормозящее действие момента сопротивления, что отвечает усилию резания, потерям трения, подъему груза, сжатию пружины и т.п. при положительном знаке скорости.
указывает на тормозящее действие момента сопротивления, что отвечает усилию резания, потерям трения, подъему груза, сжатию пружины и т.п. при положительном знаке скорости. (2.23а)
(2.23а)
 - полное сопротивление цепи якоря,Ом; Ф- магнитный поток, Вб.
- полное сопротивление цепи якоря,Ом; Ф- магнитный поток, Вб. - конструктивный коэффициент двигателя; p-число пар полюсов;N-число активных проводников обмотки якоря; а – число параллельных ветвей обмотки якоря.
- конструктивный коэффициент двигателя; p-число пар полюсов;N-число активных проводников обмотки якоря; а – число параллельных ветвей обмотки якоря.
 /(
/(

 4
4 Внутреннее сопротивление якорной цепи включает собственное сопротивление якорной обмотки, сопротивление обмотки дополнительных полюсов, компенсационной обмотки и щеток. Соответственно перепад скорости для естественной характеристики
Внутреннее сопротивление якорной цепи включает собственное сопротивление якорной обмотки, сопротивление обмотки дополнительных полюсов, компенсационной обмотки и щеток. Соответственно перепад скорости для естественной характеристики