|
| №
| Имя функции
| Описание функции
|

|
| TRANSFER DATA
| Копирует программу (блок шагов) в другую программу
|
|
| MIRROR IMAGE
| Преобразовывает обученные данные в симметричное отображение относительно плоскости YZ робота
|
|
Опция
| TRANSFORM DATA
| Преобразовывает независимые данные в оперативное использование
|
|
| XYZ SHIFT
| Сдвигает данные позиции в базовой системе координат
|
|
| JOINT SHIFT
| Сдвигает данные позиции относительно угловых данных по каждой оси
|
|
| TOOL SHIFT
| Сдвигает данные позиции в инструментальной системе координат
|
|
| WORK SHIFT
| Сдвигает данные позиции в рабочей системе координат
|
|
| INVERSEPROGRAM COPY
| Переносит программные шаги в обратном порядке
|

|
| SAVE
| Сохраняет программные данные во внешней памяти устройства
|
|
| LOAD
| Загружает информацию файла из внешней памяти в системную память
|
|
| FILE LIST
| Отображает листинг файлов, запомненных во внешней памяти
|
|
| FORMAT
| Форматирует дискету или удаляет файлы
|
|
| DELETE FILE
| Удаляет файлы из внешней памяти
|
|
| RENAME FILE
| Переименовывает файлы во внешней памяти
|
|
| COPY FILE
| Копирует имеющиеся файлы в выбранный файл во внешней памяти
|
|
| SET VERIFYING FUNCTION
| Устанавливает функцию проверки всех записей на диске в состояние ON/OFF
|
|
| SET DEFAULT DEVICE
| Устанавливает по умолчанию область внешнего устройства
|

|
| SPEED
| Устанавливает уровень скорости для дополнительных данных (0-9)
|
|
| ACCURACY
| Устанавливает уровень точности для дополнительных данных
|
|
| TIMER
| Устанавливает уровень таймера для дополнительных данных
|
|
| TOOL COORDINATES
| Задает инструментальную систему координат. Регистрирует массу, положения центра тяжести и инерционный момент инструмента
|
|
Опция
| FIXED TOOL COORDINATES
| Задает фиксированную инструментальную систему координат для операции, основанной на фиксированной точке
|

|
Опция
| WORK COORDINATES
| Задает координатную систему, привязанную к детали
|
|
| TEACH/CHECK SPEED
| Задает скорость проверочных операций
|
|
| HOME POSITION
| Задает или отображает позиции безопасности робота
|
|
Опция
| WORKING SPASE
| Задает верхнюю и нижнюю позиции рабочего пространства
|
|
| LOAD ON ARM
| Задает нагрузку на руку
|
|
| AUTO TOOL COORDINATES REGISTER
| Измеряет и регистрирует инструментальную систему координат, смещения автоматически при использовании робота
|

|
| ZEROING
| Выполняет обнуление
|
|
| ZEROING DATA SET/DISPLAY
| Задает/отображает данные обнуления
|
|
| POS.DEVIATION ERROR RANGE AT E-STOP
| Задает допустимые границы смещения для проверки значений энкодера после аварийного останова
|
|
| ENCODER VALUE ERROR RANGE AT POWER-ON
| Задает границу ошибки для проверки значений энкодера, когда включается силовое питание
|
|
| ROBOT INSTALLATION POSTURE
| Задает монтажное положение робота
|
|
| BASE COORDINATES
| Задает базовую систему координат
|
|
| MOTION LIMITS
| Задает верхнюю и нижнюю границы для посуставного движения робота
|
|
| SLOW REPEAT
| Устанавливает скорость для медленной операции повтора
|
|
| INTERFACE PANEL
| Задает переключатели и лампы для интерфейсной панели
|

|
| DEDICATED INPUT SIGNAL
| Задает входные, приоритетные сигналы
|
|
| DEDICATED
OUTPUT SIGNAL
| Задает входные приоритетные сигналы
|
|
| DEDICATED SIGNALS DISPLAY
| Отображает состояние приоритетных сигналов
|
|
Опция
| OX SPECIFICATION SETTING
| Устанавливает спецификацию для каждого из OX сигналов
|
|
| CLAMP SPECIFICATION
| Устанавливает спецификации для фиксаторов и инструмента
|
|
| SIGNAL NAME
| Устанавливает и отображает имена для входных, выходных внешних и внутренних сигналов
|
|
| NUMBER OF I/O SIGNALS
|
|

|
| ERROR LOGGING DISPLAY
| Отображает архив ошибок
|
|
| OPERATION LOGGING DISPLAY
| Отображает архив операций
|
|
| OPERATION DATA DISPLAY
| Отображает информацию об операциях робота
|

|
| MEMORY AVAILABLE
| Отображает системную память доступную в данный момент
|
|
| INHIBIT RECORD
| Разрешает или запрещает регистрацию или изменение программ
|
|
| RESET CHECK SUM ERROR
| Разрешает или запрещает восстановить проверку суммарной ошибки
|
|
| SOFTWARE VERSION
| Отображает версию программного обеспечения
|
|
| INITIALIZE SYSTEM
| Удаляет программы и точки из памяти и устанавливает системные переключатели в исходное положение
|
|
| BATTERY ERROR CHECK
| Разрешает или запрещает проверку для резервной батареи
|
|
| CHECK SPECIFICATION
| Устанавливает условия, которые будут использоваться в проверочном режиме
|
|
| ENVIRONMENT DATA
| Устанавливает синхронизацию для выключения серво моторов автоматически
|
|
| TIME/DATE
| Отображает дату и время
|
|
| PC PROGRAM RUN/STOP
| Выполняет или останавливает PC программу
|
|
| LANGUAGE
| Выбирает язык для пульта
|
|
|
| NETWORK SETTING
| Устанавливает данные сети
|
|
|
| SELECT AUXILARY FUNCTION
| Устанавливает отображение уровней дополнительных функций
|
|
|
| CHANGE OPERATION LEVEL
| Устанавливает доступные уровни для оперативных экранов и функций
|
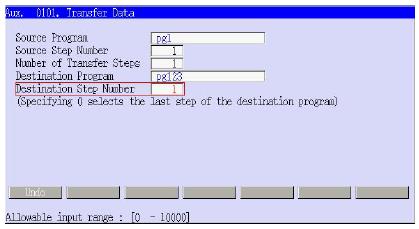
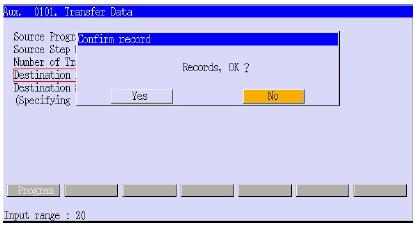
A-0101 TRANSFER DATA
Эта функция позволяет пользователю перемещать программные шаги (шаг) между программами или в другой шаг в пределах самой программы.
| Пункт
| Описание
| Кнопки
|
| Source Program
| Задает имя программы, из которой происходит перенос
| <Program>
|
| Source Step Number
| Задает первый шаг программы, с которого начинается перенос
|
NUMBER
|
| Number of Transfer Steps
| Задает количество шагов для переноса
|
NUMBER
|
| Destination Program
| Задает имя программы, в которую производится перенос
| <Program>
|
| Destination Step Number
| Задает первый шаг в программе назначения для приема перемещаемых данных (задание 0 переносит шаги после последнего шага программы назначения).
|
NUMBER
|
- Нажмите <Program> и выберите имя программы. Затем нажмите
 .
.

2.Введите требуемые данные и нажмите 
3.Отобразится подтверждающий блок. Если все нормально, переведите курсор на <Yes> и нажмите SELECT.
4.Когда появится надпись “Copy completed”, установка произведена.
(ПРИМЕЧАНИЕ)
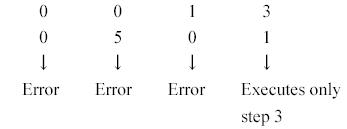
Когда количество шагов для переноса задано 0, происходит ошибка.
Когда 0 задается для первого шага переноса, происходит ошибка.
Когда количество шагов больше чем последний шаг программы назначения, перенос выполняется до последнего шага.
Пример
A-0102 MIRROR IMAGE
Эта функция преобразует обученные позиции в зеркальное, симметричное отражение относительно плоскости YZ робота. Поэтому возможно создать симметричные позиции без обучения, если положение деталей зеркально симметричны относительно YZ плоскости.

| Пункт
| Описание
| Кнопка
|
| Program name
| Определяет имя программы для зеркального отображения преобразований
| <Program>
|
| Start Step
| Определяет первый шаг для зеркального отображения преобразований
| NUMBER
|
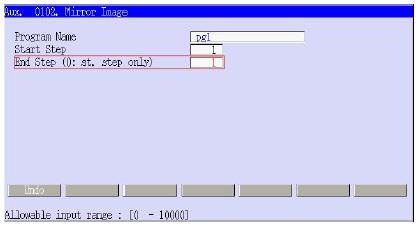
| End Step
| Определяет последний шаг для зеркального отображения преобразований
| NUMBER
|
1. Нажмите <Program> и выберите имя программы. Затем нажмите . 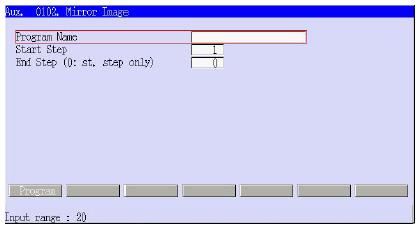
2.Введите требуемые данные и нажмите .
3.Отобразится подтверждающий блок. Если все нормально, переведите курсор на <Yes> и нажмите SELECT.

4.Когда появится надпись “Copy completed”, установка произведена.
(ПРИМЕЧАНИЕ)
Когда последний шаг задается 0, только первый шаг обрабатывается.
Когда 0 присваивается для первого шага, происходит ошибка.
Когда количество шагов больше чем последний шаг программы назначения, перенос выполняется до последнего шага.
Пример

Эта функция действительна только для позиций, обученных в блочном программировании. Точки, обученные в AS программировании, не могут быть преобразованы.