
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
На атмосферном и безатмосферном участках полетаСодержание книги
Поиск на нашем сайте
В настоящее время используются следующие схемы формирования программ управления РН на участке выведения, реализуемые в алгоритмах КАУ: -управление относительно жестко заданной (опорной) траектории; -терминальное управление, по результатам прогноза составляющих вектора конечного состояния, осуществляемое путем численного интегрирования уравнений движения. Особенностью моделирования траектории РН на этапе баллистического проектирования является достаточно ограниченный (вследствие лимита времени) перечень орбит выведения. Так, например, сравнение энергетических характеристик альтернативных вариантов РН проводится, как правило, всего для одной-двух типов орбит. В частности для РН СЛК и ЛК используется круговая орбита минимального (для выбранного космодрома) наклонения высотой 200 км и солнечно-синхронная орбита высотой 450-850 км. Что позволяет ограничиться «классическими» квазиоптимальными программами управления, отработанными в процессе эксплуатации РН, оснащенных аналоговым КАУ. Для управления движением центра масс РН на участке выведения первой ступени, т.е. на атмосферном участке полета, в качестве базовой программы воспользуемся однопараметрической программой управления углом атаки, показанной на рис.13. Программа включает участок вертикального полёта, на котором производится начальный разгон РН до скорости не менее 30-50 м/с, обеспечивающий устойчивый полёт РН и возможность начала маневрирования по углу атаки и участок программного разворота на отрицательный угол атаки, заканчивающийся на трансзвуковой скорости. Программа управления углом атаки реализуется следующим образом:
где
Управляющими параметрами, обеспечивающими «настройку» программы на заданные краевые условия, являются величина максимального угла атаки
Рис.12 Программы управления двухступенчатой РН на участке выведения
Задачей программы управления углом атаки является формирование на момент разделения ступеней величины угла тангажа Программы управления на участках полёта первой и второй ступеней задаются в функции времени, определяемом продолжительностью работы ДУ ступени, которая в свою очередь зависит от величины рабочего запаса топлива Следует иметь ввиду, что для снижения динамических нагрузок в конце участка работы ДУ и минимизации разброса величины конечной скорости, определяемой импульсом последействия (неуправляемым догоранием топлива в ЖРД после прохождения команды на его выключение) выключение двигателя, производится, как правило, через работу на пониженном режиме, именуемом «конечной ступенью тяги» (КСТ). Таким образом, функциональной командой, формирующей программу управления ДУ является команда «Начало перевода ДУ на конечную ступень тяги» Если, по требованию Заказчика ДУ РН в процессе выведения должна реализовать участок выдерживания постоянной перегрузки, кусочно-линейная программа управления режимом работы ДУ, должна соответствующим образом корректироваться непосредственно в процессе моделирования полета РН. С этой целью управление режимом работы ДУ на изоперегрузочном участке, начало которого определяется моментом достижения граничного значения продольной перегрузки, а окончание – моментом прохождения команды
где При этом после прохождения команды
Управление РН на участке полета второй ступени проводится изменением программного угла тангажа. Двухпараметрическая программа управления углом тангажа выбирается из семейства линейных программ вида: где
Управляющими параметрами, обеспечивающими «настройку» программы управления, являются величины скорости изменения программного угла тангажа на первом и втором участках Для формирования требуемой орбиты выведения, помимо высоты и угла тангажа, требуется ещё один параметр – конечная скорость полёта, которая определяется величиной расходуемого рабочего запаса топлива, задаваемой циклограммой работы ДУ ступени. Очевидно, что приближенно заданных в процессе формирования исходных данных величин рабочих запасов топлива на ступенях может или не хватить для достижения заданной конечной скорости или наоборот, на момент выключения ДУ на второй ступени останутся сверхгарантийные остатки топлива. В этом случае производится их коррекция на первой или второй ступени с соответствующим пересчётом массово-габаритных характеристик баков. В заключении следует отметить, что для уменьшения размерности краевой задачи наклонение орбиты исключается из числа краевых условий и определяется отдельно, методом пристрелки, с использованием в качестве управляющего параметра начального значения курсового угла
|
||
|
|
Последнее изменение этой страницы: 2021-05-12; просмотров: 182; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.20 (0.009 с.) |


 , (34)
, (34) ,
, - время конца вертикального участка полета;
- время конца вертикального участка полета; - максимальное значение угла атаки;
- максимальное значение угла атаки; - время набора максимального значения угла атаки.
- время набора максимального значения угла атаки. . При этом: продолжительность вертикального участка полета, определяемая параметром
. При этом: продолжительность вертикального участка полета, определяемая параметром 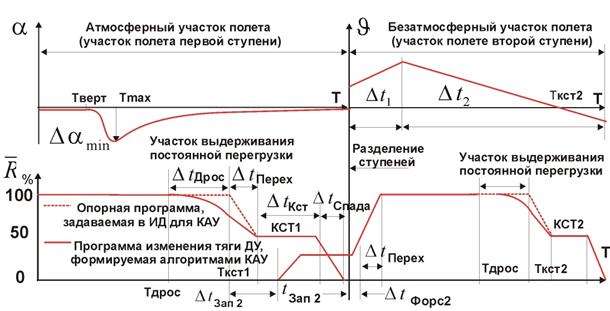
 , обеспечивающего падение ОЧ первой ступени одноразовой РН на заданную дальность в центр выделенного района падения. Если дальность до РП ОЧ не определена, то угол атаки выбирается итеративно, в процессе решения оптимизационной задачи путём совместного моделирования участков полёта первой и второй ступеней из условия выведения ПН максимальной массы на опорную орбиту. Для КРБ, у которого нет района падения, поступают аналогичным образом, при этом выбор оптимального значения угла
, обеспечивающего падение ОЧ первой ступени одноразовой РН на заданную дальность в центр выделенного района падения. Если дальность до РП ОЧ не определена, то угол атаки выбирается итеративно, в процессе решения оптимизационной задачи путём совместного моделирования участков полёта первой и второй ступеней из условия выведения ПН максимальной массы на опорную орбиту. Для КРБ, у которого нет района падения, поступают аналогичным образом, при этом выбор оптимального значения угла  , находящегося в баках. Общий вид программ управления режимом работы маршевых двигателей первой и второй ступеней на участке выведения
, находящегося в баках. Общий вид программ управления режимом работы маршевых двигателей первой и второй ступеней на участке выведения  показан на рис. 13. Предполагается, что, в случае наличия в составе ДУ ступени рулевого двигателя, последний работает в режиме
показан на рис. 13. Предполагается, что, в случае наличия в составе ДУ ступени рулевого двигателя, последний работает в режиме  в течение всего полета.
в течение всего полета. . Величина
. Величина  , (36)
, (36) - режим работы маршевого двигателя, сформированный на предыдущем обращении модуля «модель движения» к модулю «КАУ»;
- режим работы маршевого двигателя, сформированный на предыдущем обращении модуля «модель движения» к модулю «КАУ»; - коэффициент усиления.
- коэффициент усиления. , i = 1, 2, (35)
, i = 1, 2, (35) - угол ориентации продольной оси РН в сферически-скоростной системе координат относительно линии местного горизонта;
- угол ориентации продольной оси РН в сферически-скоростной системе координат относительно линии местного горизонта; - значения параметров, соответствующих началу i -го участка программы (
- значения параметров, соответствующих началу i -го участка программы ( = const =5 с).
= const =5 с). и
и  . Задачей программы управлении углом тангажа является достижение заданной высоты полёта в конце участка выведения, которая в первую очередь будет определяться величиной
. Задачей программы управлении углом тангажа является достижение заданной высоты полёта в конце участка выведения, которая в первую очередь будет определяться величиной  .
.


