Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Электромеханические исполнительные механизмы
Электродвигатели Электродвигатель преобразует энергию электромагнитного поля в механическую энергию вращения ротора. В АСУ ТП используют электродвигатели, выходные характеристики которых определяются величиной управляющего сигнала. Они получили название исполнительных, или управляемых, электродвигателей и могут быть постоянного тока, переменного тока и шаговыми. Особенностью исполнительных двигателей в отличие от силовых является то, что они практически никогда не работают в номинальном режиме. Для их работы характерны частые пуски, остановки, реверсы. Электродвигатели постоянного тока легче управляются, но двигатели переменного тока более надежны, просты и дешевы. Шаго- 135 вые электродвигатели обеспечивают пошаговое перемещение регулирующих органов. Основные требования, предъявляемые к; исполнительным электродвигателям: • широкий диапазон регулирования скорости вращения; • большой пусковой момент; • простота регулирования; • отсутствие «самохода», т.е. способность двигателя останавливаться сразу же после снятия сигнала управления; • возможность реверсирования; • высокое быстродействие; • большая мощность при малых габаритных размерах. Первыми появились двигатели постоянного тока. В 30-х гг. XIX в. русский ученый Б. С.Якоби построил действующий электродвигатель, основные элементы которого сохранились до настоящего времени. Он стал основным исполнительным двигателем приводов, требующих плавного регулирования скорости вращения в широком диапазоне. В конце XIX в. М.О.Доливо-Добровольский предложил конструкцию трехфазного асинхронного электродвигателя переменного тока с короткозамкнутым ротором, ставшего основой асинхронных исполнительных приводов. Электродвигатели постоянного тока. Электродвигатель постоянного тока (рис. 6.1, а) состоит из статора с полюсами, на которых размещена обмотка возбуждения, якоря с обмоткой и коллектора с щетками. В качестве исполнительных электродвигателей малой мощности широкое применение нашли магнитоэлектрические двигатели, магнитное поле которых создается за счет постоянных магнитов (двигатели серии ДПМ и ДПР) (рис. 6.1, б).
Обмотки полюсов двигателя служат для создания постоянного магнитного поля, в котором вращается якорь. Если к обмотке якоря приложить напряжение U, то в ней потечет ток /я (рис. 6.2, а).
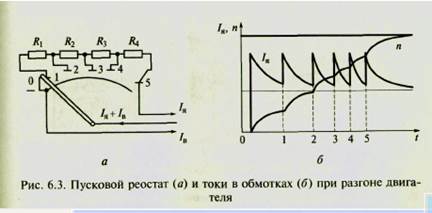
Взаимодействие тока и магнитного поля создаст электромагнитную силу, которая заставит якорь двигаться. Как только он начнет вращаться (пересекать магнитное поле), в его обмотках наведется ЭДС ея, создающая ток, направленный навстречу току от приложенного напряжения. В результате ток в якоре будет определяться разностью между напряжением питания и наведенной ЭДС: Гя = (и-ея)/Кя, (6.1) где rk — сопротивление обмотки якоря. Коллектор в электродвигателях постоянного тока служит для преобразования постоянного напряжения, подводимого к щеткам, в переменное напряжение в обмотке якоря, что позволяет сохранить неизменным его направление вращения (рис. 6.2, б). В момент пуска, когда ея = О, ток якоря может достигать значительной величины (см. формулу (6.1)), что требует применения в схеме пускового реостата (ПР), включаемого последовательно с якорной обмоткой Я1 — Я2 (рис. 6.2, в). По мере разгона двигателя сопротивление пускового реостата уменьшается до нуля (рис. 6.3, а). Ток /в в обмотке возбуждения Ш1 —Ш2 остается неизменным;
137
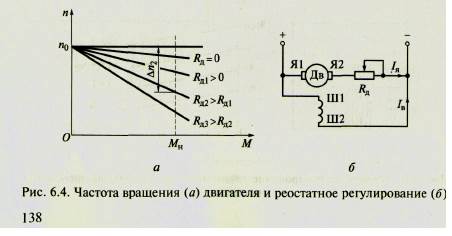
при этом ток якоря /я и частота вращения п достигают установившихся значений (рис. 6.3, б). Двигатель постоянного тока обладает «жесткой» механической характеристикой (зависимостью частоты вращения от момента нагрузки), т.е. при увеличении нагрузки частота вращения уменьшается незначительно (рис. 6.4, а, прямая Лд = 0). Регулирование частоты вращения двигателя постоянного тока возможно за счет: • изменения сопротивления Ra в цепи якоря — реостатное регулирование (рис. 6.4, б). При этом частота вращения двигателя без нагрузки л0 остается неизменной, а с появлением момента нагрузки Л/н на валу изменяется в широком диапазоне (см. рис. 6.4, а);
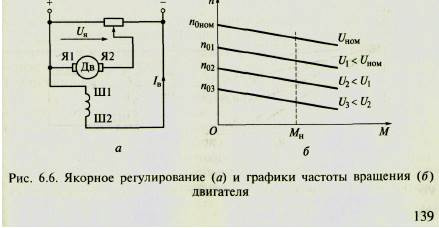
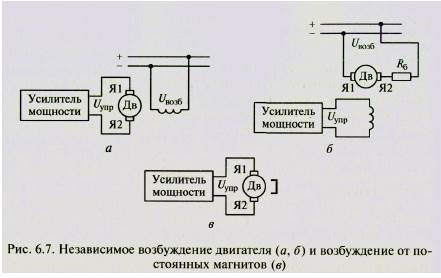
• изменения тока в обмотках возбуждения — полюсное регулирование (рис. 6.5, а) путем изменения сопротивления Лвв цепи возбуждения. При этом изменяется частота вращения как без нагрузки, так и с нагрузкой (рис. 6.5, б). Полюсное регулирование является экономичным, поскольку управление магнитным потоком возбуждения осуществляется за счет изменения тока возбуждения /в, величина которого невелика; • изменения напряжения питания £/я якорной обмотки — якорное регулирование (рис. 6.6, а). При этом поток возбуждения должен оставаться неизменным. Это должны быть двигатели с независимым, параллельным возбуждением или магнитоэлектрические двигатели. Частота вращения двигателя практически линейно зависит от напряжения питания якорной обмотки £/„ (рис. 6.6, б). Широкое применение в качестве исполнительных нашли двигатели постоянного тока с независимым возбуждением и возбуждением от постоянных магнитов. При независимом возбуждении в качестве обмотки управления используется либо обмотка якоря — якорное регулирование (рис. 6.7, а), либо обмотка полюсов — полюсное регулирование (рис. 6.7, б). 138
ку постоянного чапряжения и является обмоткой возбуждения. На обмотку якор: сигнал с усилителя мощности подается лишь тогда, когда необходимо вращение якоря. Во втором случае к источнику постоянна о напряжения всегда подключена обмотка якоря, которая выполняет роль обмотки возбуждения. Управляющей обмоткой является обмотка полюсов. Для ограничения пусковых токов в якорной обмотке во время переходных режимов последовательно с ней включается балластное сопротивление rq. В двигателях с возбуждением от постоянных магнитов управляющей обмоткой всегда является обмотка якоря, т.е. такие двигатели всегда работают с якорным регулированием (рис. 6.7, в). Основными преимуществами исполнительных двигателей постоянного тока являются возможность плавного регулирования их частоты вращения от нуля до максимального значения, высокий пусковой момент и высокое быстродействие. Основными недостатками двигателей постоянного тока являются невысокая надежность и недолговечность из-за наличия кол-
лектора и щеток, которые могут истираться, забиваться пылью и продуктами износа, а также искрить. Электродвигатели переменного тока. Электродвигатели переменного тока могут быть асинхронными и синхронными. Асинхронные двигатели по сравнению с машинами постоянного тока более надежны и долговечны, просты конструктивно и в обслуживании, имеют более широкий диапазон мощностей. Принцип действия трехфазного асинхронного двигателя основан на взаимодействии вращающегося магнитного поля с токами, наводимыми в обмотках ротора этим полем. Помещенный во вращающееся магнитное поле ротор с обмоткой начинает вращаться в направлении магнитного поля. Однако догнать поле ротор не может, так как в противном случае поток перестанет пересекать обмотку и в ней не будет наводиться ЭДС, а следовательно, ток и электромагнитный момент будут равны нулю.
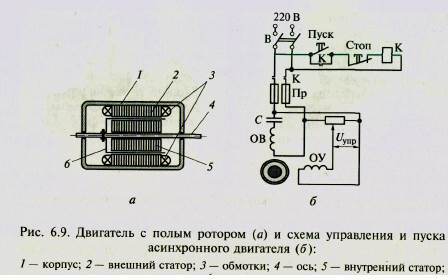
Таким образом, в асинхронной машине всегда частота вращения ротора п меньше частоты вращения магнитного поля п\. Величина S = (п\ - п)/п\ называется скольжением в асинхронной машине и для электродвигателя с короткозамкнутым ротором находится в пределах 2...7 %, т.е. асинхронная машина имеет «жесткую» механическую характеристику. Реверсирование в трехфазном асинхронном двигателе осуществляется за счет изменения направления вращения магнитного поля, которое, в свою очередь, определяется порядком чередования фаз: прямой (А, В, Q или обратный (А, С, В) (рис. 6.8, а). В АСУ ТП широко применяются и двухфазные асинхронные двигатели. Они имеют на статоре две обмотки: обмотку управле- 140 ния (ОУ) и обмотку возбуждения (ОВ), сдвинутые в пространстве на 90° и питаемые токами, сдвинутыми по фазе в идеальном случае также на 90°. Это позволяет получить вращающееся магнитное поле, поэтому принцип работы двухфазного асинхронного двигателя аналогичен принципу работы трехфазной машины. Обе обмотки статора могут питаться от одной и той же сети, но в одну из обмоток — обмотку возбуждения — включается конденсатор С, что позволяет сдвинуть токи в обмотках по фазе. Такой двигатель называется конденсаторным (рис. 6.8, 6). Ротор двухфазных машин, используемых в качестве исполнительных двигателей, чаще выполняется в виде полого алюминиевого стаканчика. Двигатель с полым ротором (рис. 6.9, а) имеет внутренний 5 и внешний 2 статоры из наборного железа, расположенные на корпусе /. На внешнем статоре размещаются две обмотки 3, сдвинутые в пространстве на 90°. Внутренний статор служит для уменьшения сопротивления магнитному потоку. Между статорами на оси 4 вращается алюминиевый тонкостенный стаканчик — ротор 6 (толщина стенок — 0,1... 1,0 мм.) Работа двигателя с полым ротором основана на взаимодействии вращающегося магнитного поля, создаваемого обмотками статора, с вихревыми токами, наводимыми этим полем в алюминиевом стаканчике. Момент инерции полого ротора мал, поэтому быстродействие двигателя велико. Большое активное сопротивление тонкостенного стаканчика и «мягкая» механическая характеристика п =/(Мн) двигателя с полым ротором позволяют уменьшать частоту вращения ротора за счет изменения подводимого напряжения {Уупр от максимальной (синхронной) почти до нуля. Такое управление называется амплитудным (рис. 6.9, б}.
Если напряжение питания обмоток оставить неизменным, а изменять угол сдвига фаз между токами в обмотках с помощью Стр141
фазосдвигающей цепочки, то частота вращения ротора тоже будет изменяться; такое управление называется фазовым. Можно изменять и амплитуду управляющего напряжения, и фазу — это амплитудно-фазовое управление. Двухфазный двигатель с одним из рассмотренных способов управления частотой вращения может использоваться в качестве исполнительного, в то время как трехфазные асинхронные двигатели применяют в качестве силовых. На рис. 6.9, б приведена также схема пуска асинхронного двигателя. После срабатывания выключателя В нажимается кнопка «Пуск» и по обмотке контактора К течет ток. Контактор срабатывает и замыкает контакты цепи питания обмоток статора, а также контакты, блокирующие кнопку «Пуск». Для остановки двигателя необходимо нажать кнопку «Стоп», которая разрывает цепь питания обмотки контактора, и тот разрывает цепь обмоток статора и разблокирует контакты, включенные параллельно кнопке «Пуск». На рис. 6.10, а представлен двигатель с короткозамкнутым ротором, а на рис. 6.10, 6 — двигатель с полым ротором. Так как частота вращения асинхронного двигателя определяется частотой сети и обычно составляет около 3 000 об/мин, в конструкцию исполнительного механизма обычно вводится редуктор. Это позволяет получить приемлемые скорости перемещения рабочих органов. Асинхронный двигатель с короткозамкнутым ротором и редуктором, называемый также мотор-редуктором, представлен на рис. 6.11. 142
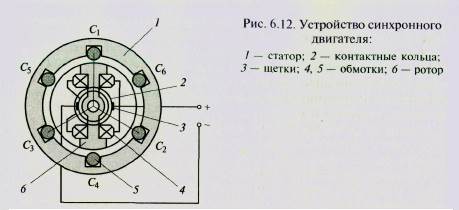
Синхронные двигатели — это электрические машины, частота вращения ротора п которых равна частоте вращения магнитного поля и,, создаваемого обмоткой статора. В основе работы синхронного двигателя лежит взаимодействие вращающегося магнитного поля статора с постоянным магнитным полем ротора. Статор / синхронного двигателя (рис. 6.12) ничем не отличается от статора асинхронного и имеет обмотки 5, служащие для создания вращающегося магнитного поля. Ротор синхронной машины 6 имеет обмотку 4, выполненную изолированным проводом и питаемую постоянным током через контактные кольца 2 и щетки 3. Основное назначение обмоток ротора — создание постоянного магнитного поля. В процессе работы происходит взаимодействие внешнего и внутреннего магнитных полей: вращающееся внешнее поле за счет «сцепления» магнитных полей увлекает за собой ротор, причем угловые скорости вращения внутреннего и внешнего полей оказываются одинаковыми.
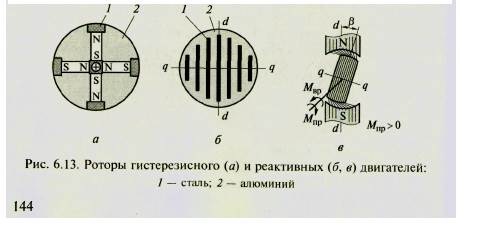
Питание обмотки ротора постоянным током имеет два недостатка: необходим источник постоянного напряжения; контактное устройство (кольца со щетками) снижает надежность. Этих недостатков лишены электродвигатели, в которых вместо электромагнита в роторе используется постоянный магнит с высокой коэрцитивной силой. Такие двигатели называются гистере-зисными. В их роторах магниты заливаются алюминием, образуя сплошной цилиндр (рис. 6.13, а). Алюминий играет роль пусковой обмотки, в которой под действием вращающегося магнитного поля наводятся вихревые токи. Под действием этих токов ротор приходит во вращение аналогично полому ротору асинхронного двигателя. Мощность таких машин небольшая — до 300 Вт.
Широко применяются в качестве машин малой мощности также реактивные электродвигатели. В них источник постоянного магнитного поля на роторе отсутствует. Его вращение обеспечивается особой формой ротора (рис. 6.13, б, в) и «упругостью» магнитных силовых линий, которая заставляет ротор при отсутствии нагрузки располагаться по оси полюсов статора и вращаться синхронно с полем статора. При наличии нагрузки ротор отстает от оси по-
люсов на угол (3, но продолжает вращаться с синхронной скоростью (т.е. с той же скоростью, что и магнитное поле). В роторе, представленном на рис. 6.13, б, стальные полосы / залиты алюминием 2, а на рис. 6.13, в ротор выполнен в виде скошенного по бокам цилиндра из ферромагнитного материала. В обоих случаях намагниченность по оси d — d обеспечивается значительно легче, чем по оси q — q. Схемы включения обмоток статора синхронного и асинхронного двигателей аналогичны, поскольку в обоих случаях статор служит для создания вращающегося магнитного поля. Основное применение синхронные двигатели нашли в устройствах, в которых необходимо поддерживать неизменной скорость вращения основных узлов: в лентопротяжных механизмах, самопишущих и регистрирующих приборах, электромагнитных муфтах. Шаговые электродвигатели. Цифровая форма представления сигналов управления в ЭВМ привела к созданию нового типа двигателей — шаговых, которые непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в фиксированный угол поворота вала или линейное перемещение. В основе работы шаговых двигателей лежит стремление магнитного потока замыкаться по пути наименьшего сопротивления. В них статор и ротор, выполненные из ферромагнитного материала, имеют направленные друг к другу прямоугольные выступы (полюсы), расположенные равномерно (рис. 6.14, а). Число полюсов на статоре и роторе одинаково и достаточно велико — от десятков до 200 и более. Статор состоит из трех секций, расположенных вплотную друг к другу, на которых размещены отдельные обмотки. Полюсы всех секций статора совмещены. Обмотки секций включаются в систему управления независимо друг от друга. Ротор также состоит из трех секций, расположенных на одном валу, но полюсы второй секции смещены относительно полю-
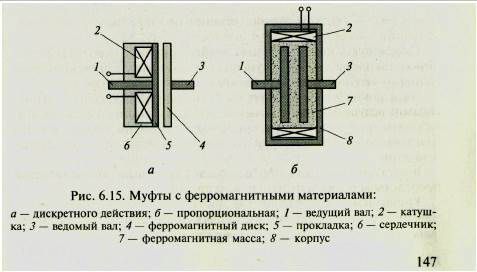
сов первой секции на 1/3 шага полюсов, а третьей секции — на 2/3 шага. Если выступ ротора находится под выступом статора (рис. 6.14, б, положение 1), то магнитное сопротивление цепи статор —ротор наименьшее. При подаче напряжения в обмотку статора этой секции ротор остается неподвижным. Если же напряжение подать в обмотку статора соседней секции, то ротор поворачивается на 1/3 шага полюсов (см. рис. 6.14, б, положение 2), т.е. до тех пор, пока полюс ротора не окажется под полюсом статора. Если подать напряжение в обмотку следующей секции, то произойдет поворот еще на 1/3 шага (см. рис. 6.14, б, положение 3) и т.д. Таким образом, угол поворота ротора будет определяться количеством последовательно подаваемых в обмотки импульсов, а скорость поворота — частотой этих импульсов. Точность углового перемещения в шаговых двигателях достигает 0,5°, а частота — более 1 000 шагов в секунду. Реверс обеспечивается за счет смены последовательности подачи импульсов в секции статора. Широкое применение шаговые двигатели нашли в качестве исполнительных для перемещения рабочих органов в металлорежущих станках, причем их мощность может находиться в диапазоне от единиц до сотен ватт. Если же мощность недостаточная, то применяется агрегат из шагового двигателя с гидроусилителем. Основными достоинствами шаговых двигателей являются работа непосредственно от дискретных сигналов ЭВМ без их преобразования, высокая точность позиционирования, надежность, простота и долговечность; основными недостатками — невысокие КПД и мощность. Электромагнитные муфты Муфта — это устройство, обеспечивающее передачу вращательного движения от одного вала к другому. Существуют неуправляемые муфты, обеспечивающие постоянное сцепление валов, и управляемые, которые передают движение от ведущего вала к ведомому по сигналам управления. Электромагнитная муфта представляет собой устройство с двумя валами: ведущим, приводимым в действие любым двигателем, и ведомым, непосредственно связанным с рабочими органами. На валах имеются элементы сцепления, через которые и передается вращение. В электромагнитной муфте передача вращения обеспечивается посредством ферромагнитных материалов. Управляемые муфты могут быть: • дискретного действия, в которых при подаче сигнала управления осуществляется жесткое сцепление валов; 146 i • пропорциональные, в которых скорость вращения ведомого вала определяется величиной сигнала управления. Муфта дискретного действия (рис. 6.15, а) состоит из ферромагнитного сердечника с катушкой на ведущем валу и ферромагнитного диска на ведомом валу. При подаче в катушку сигнала управления под действием магнитного потока создается электромагнитная сила, которая перемещает ферромагнитный диск по оси до соприкосновения с ферромагнитным сердечником. Затем за счет сил сцепления диск и ведомый вал приходят во вращение со скоростью, равной скорости вращения ведущего вала. При снятии сигнала управления ферромагнитный диск под действием пружины расцепляется с продолжающим вращаться сердечником и ведомый вал останавливается. Для уменьшения влияния остаточной магнитной индукции при снятом сигнале управления на сердечнике размещается немагнитная прокладка (например, медная). Такие муфты могут быть реверсивными и нереверсивными. Передаваемая муфтой мощность находится в диапазоне от единиц ватт до нескольких киловатт; время срабатывания — от 2 до 20 мс. В пропорциональной муфте (рис. 6.15, б) диски помещены в корпус, заполненный масляной ферромагнитной массой — порошком карбонильного железа с тальком. Попадая в магнитное поле, создаваемое катушкой, ферромагнитная масса увеличивает свою вязкость и плотно соединяет полумуфту ведущего вала с полумуфтой ведомого вала. Вязкость ферромагнитной массы растет по мере увеличения магнитного поля, т.е. величины тока в катушке. Следовательно, скорость вращения ведомого вала зависит от тока в обмотке при постоянной скорости ведущего вала. Присутствие талька в карбо-
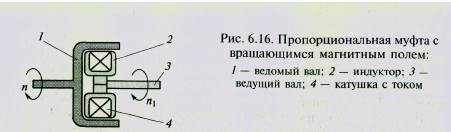
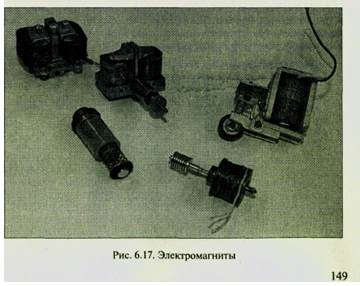
нильном железе аналогично немагнитной прокладке в муфтах дискретного действия: тальк обволакивает каждую частичку порошкообразного железа, помогая им легче распасться при снятии управляющего напряжения. Пропорциональные муфты применяют в системах управления совместно с синхронным электродвигателем. Еще одна схема пропорциональной муфты, работающей по принципу асинхронного двигателя, приведена на рис. 6.16. Если частота вращения ведущего вала с индуктором равна и,, то ведомый вал может вращаться с частотой п, немного меньшей л,, подобно тому, как ротор асинхронного двигателя вращается, увлекаемый вращающимся магнитным полем. При этом частота вращения ведомого вала при работе с нагрузкой определяется величиной тока в катушке индуктора. Основными достоинствами электромагнитных муфт являются: • высокое быстродействие; • плавный пуск и регулирование скорости вращения; • простота управления; • большой диапазон мощностей; • высокая надежность; • долговечность. Электромагниты и реле Электромагниты — это электромеханические устройства, преобразующие двоичные управляющие сигналы в фиксированное линейное или угловое перемещение рабочих органов. Они широко используются в АСУ ТП для открытия и закрытия клапанов, заслонок и вентилей, а также в коммутационных устройствах (реле, контакторы, пускатели). Они применяются в распределительных устройствах пневмо- и гидроприводов для управления потоком газа или жидкости, электромагнитных муфтах, устройствах защиты (тепловое или токовое реле, автоматические предохранители). Электромагниты (рис. 6.17) могут быть постоянного и переменного тока с управляющим напряжением от 6 до 220 В и развиваемым усилием от долей до десятков и сотен ньютонов; они бы- 148 вают удерживающие и приводные, дроссельного и соленоидного типа. На рис. 6.18 представлены основные типы электромагнитов, используемых для управления распределительными устройствами пневмо-и гидроприводов. При подаче тока в катушку 1 создается электромагнитная сила, под действием которой якорь 3 поворачивается (рис. 6.18, а, в) или перемещается (рис. 6.18, б, г) в направлении сердечника 2. При этом преодолевается сила противодействующей пружины 4. При снятии тока якорь возвращается в исходное состояние под действием пружины. На рис. 6.18, в показана дифференциальная конструкция поворотного электромагнита, обеспечивающая поворот якоря по часовой или против часовой стрелки при подаче тока в правую или левую катушку, а на рис. 6.18, г — конструкция соленоидного электромагнита с конической формой воздушного зазора, что позволяет повысить развиваемое электромагнитом усилие. Удерживающие электромагниты используются для закрепления деталей на станках (например, шлифовальных), в подъемных механизмах (для погрузки стальной стружки или металлолома), для удержания в закрытом состоянии входных дверей подъездов в домах. Приводные электромагниты перемещают рукоятки управления станками, обеспечивают работу электромагнитных муфт. Широкое
применение они нашли в составе пневмо- и гидроаппаратуры. Это, в первую очередь, пневмо- и гидроэлектроклапаны, управляющие расходом газа и жидкости соответственно в пневмо- и гидроприводах. Например, пневмоэлектроклапан ПЭК-47 обеспечивает подачу в пневмопривод сжатого воздуха давлением 47 • 105 Па. Электромагниты являются главными элементами электромагнитных реле. Электромагнитные реле — это электромеханические устройства, замыкающие или размыкающие электрические цепи под действием двоичных управляющих сигналов. При незначительной мощности сигнала управления, подаваемого в обмотку реле, оно способно управлять значительной мощностью в цепи нагрузки. Таким образом, электромагнитное реле можно рассматривать как усилительный элемент, причем с коэффициентом усиления в сотни тысяч раз. Ассортимент реле очень широк. Они могут быть постоянного и переменного тока, иметь всего два контакта или не-
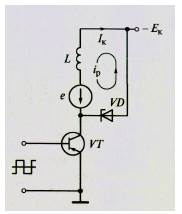
. сколько десятков контактов (рис. 6.19). Управляются электромагниты и реле, как правило, с помощью транзисторов, работающих в ключевом режиме (рис. 6.20). Обмотка электромагнита L включается в коллекторную цепь транзистора При подаче на базу транзистора прямоугольного открывающего импульса по обмотке электромагнита течет максимальный ток, обеспечивающий его срабатывание. При закрытии транзистора ток в обмотке практически мгновенно падает до нуля. Это вызывает появление значительной ЭДС самоиндукции е, препятствующей падению тока и увеличивающей напряжение на коллекторе до опасного значения. С целью предохранения транзистора от выхода из строя обмотку электромагнита шунтируют диодом или стабилитроном VD с напряжением стабилизации, не превышающим допустимого напряжения на коллекторе за вычетом напряжения питания. В этом случае ЭДС самоиндукции «разряжается» через стабилитрон, обеспечивая протекание тока разряда /р и ограничивая величину напряжения на коллекторе транзистора. Электропневматические
|
|||||||||
|
|
Последнее изменение этой страницы: 2021-04-14; просмотров: 440; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.135.216.160 (0.081 с.) |