Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Расчёт элементов принципиальной схемы и основных узлов ⇐ ПредыдущаяСтр 5 из 5
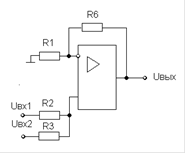
При анализе структурной схемы замкнутой скорректированной системы управления нестационарным динамическим объектом видно, что принципиальная схема устройства будет состоять из операционных усилителей типа К140УД1А, которые будут включены в различных режимах работы. В состав будет входить: сумматор, 5 форсирующих звеньев, 5 апериодических звеньев, пропорциональное звено с к = 13,3. Исходя из структурной схемы устройства можно построить принципиальную электрическую схемы. Далее проведём расчёт элементов полученной принципиальной схемы. Рассчитаем сумматор, схема которого приведена ниже.
Рисунок 4.1 - Схема сумматора
Сопротивление резисторов R1, R2, R3, R6 принимаем равным 51 кОм.
Uвых = Uвх1 + Uвх2.
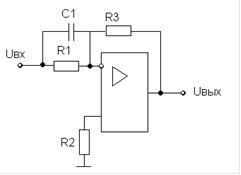
Рассчитаем форсирующие звенья:
Рисунок 4.2 - Форсирующее звено
Рассчитаем форсирующее звено T1p+1 Принимаем C1 = 20 мкФ Найдём R1 из формулы: R1 = T1/C1. T1 = 5,3
R1 = 5,3/(20*10-6) = 265 кОм.
Принимаем R1 = R3 = 265 кОм. Найдем сопротивление резистора R2:
R2 = R1||R3 = R1R3/(R1+R3) = 265*103*265*103/(265*103+265*103) = 132,5 кОм. R1 = R3 = 265 кОм, R2 = 132,5 кОм.
Рассчитаем форсирующее звено T3p+1.
T3 = 3,2 T3 = R3C1. Принимаем C1 = 20 мкФ. Тогда: R3 = T3/C1 = 3,2/20*10-6 = 160 кОм.
Принимаем R1 = R3.
R2 = R1||R3 = R1R3/(R1+R3) = 160*103*160*103/(160*103+160*103) = 80 кОм. R1 = R3 = 160 кОм, R2 = 80 кОм.
Рассчитаем форсирующее звено T2p+1.
T2 = 15, T2 = R3C1. Принимаем C1 = 20 мкФ. Тогда: R3 = T2/C1 = 15/20*10-6 = 750 кОм.
Принимаем R1 = R3. R2 = R1||R3 = R1R3/(R1+R3)=750*103*7503/(7503+7503)=375 кОм. R1 = R3 = 750 кОм, R2 = 375 кОм.
Рассчитаем форсирующее звено T1кp+1.
T1k = 0,33, T1k = R3C1. Принимаем C1 = 20 мкФ. Тогда: R3 = T1k/C1 = 0,33/20*10-6 = 16,5 кОм.
Принимаем R1 = R3.
R2 = R1||R3 = R1R3/(R1+R3)=16,5*103*16,5*103/(16,5*103+16,5*103)=0,525 кОм. R1 = R3 = 16,5 кОм, R2 = 8,25 кОм.
Рассчитаем форсирующее звено T4p+1.
T4 = 0,125, T4 = R3C1. Принимаем C1 = 20 мкФ. Тогда: R3 = T4/C1 = 0,125/20*10-6 = 6,25 кОм.
Принимаем R1 = R3.
R2 = R1||R3 = R1R3/(R1+R3)=6,25*103*6,25*103/(6,25*103+6,25*103)= кОм. R1 = R3 = 6,25 кОм, R2 = 3,125 кОм.
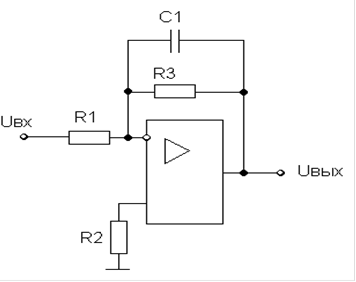
Рассчитаем апериодические звенья:
Рисунок 4.3 - Апериодическое звено
Рассчитаем апериодическое звено 1/(T2p+1)
T2 = 15 T2 = R3C1. Принимаем C1 = 20 мкФ. Тогда: R3 = T2/C1 = 15/20*10-6 = 750кОм.
Принимаем R1 = R3.
R2 = R1||R3 = R1R3/(R1+R3)=750*103*7503/(7503+7503)=375 кОм. R1 = R3 = 750 кОм, R2 = 375 кОм.
Рассчитаем апериодическое звено 1/(T4p+1).
T4 = 0,125, T4 = R3C1. Принимаем C1 = 20 мкФ. Тогда:
R3 = T4/C1 = 0,125/20*10-6 = 6,25 кОм.
Принимаем R1 = R3.
R2 = R1||R3 = R1R3/(R1+R3)=6,25*103*6,25*103/(6,25*103+6,25*103)= кОм. R1 = R3 = 6,25 кОм, R2 = 3,125 кОм.
Рассчитаем апериодическое звено 1/(T1p+1).
T1 = 5,3 T1 = R3C1. Принимаем C1 = 20 мкФ. Тогда: R1 = 5,3/(20*10-6) = 265 кОм.
Принимаем R1 = R3 = 265 кОм. Найдем сопротивление резистора R2:
R2 = R1||R3 = R1R3/(R1+R3) = 265*103*265*103/(265*103+265*103) = 132,5 кОм. R1 = R3 = 265 кОм, R2 = 132,5 кОм.
Рассчитаем апериодическое звено 1/(T3p+1).
T3 = 3,2 T3 = R3C1. Принимаем C1 = 20 мкФ. Тогда: R3 = T3/C1 = 3,2/20*10-6 = 160 кОм.
Принимаем R1 = R3.
R2 = R1||R3 = R1R3/(R1+R3) = 160*103*160*103/(160*103+160*103) = 80 кОм. R1 = R3 = 160 кОм, R2 = 80 кОм.
Рассчитаем апериодическое звено 1/(T2кp+1).
T2к = 0,03, T2к = R3C1. Принимаем C1 = 20 мкФ. Тогда: R3 = T2к/C1 = 0,03/20*10-6 = 1,5 кОм. Принимаем R1 = R3.
R2 = R1||R3 = R1R3/(R1+R3) = 1,5*103*1,5*103/(1,5*103+1,5*103) = 0,75 кОм. R1 = R3 = 1,5 кОм, R2 = 0,75 кОм.
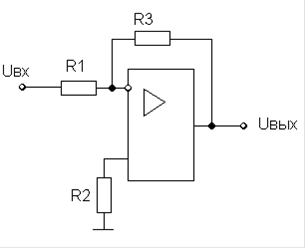
Рассчитаем пропорциональное звено:
Рисунок 4.4 - Пропорциональное звено
K = R3/R1.
Принимаем R3 = 51 кОм, следовательно:
R1 = R3/k = 51*103/13,3 = 3,8 кОм R2= R1||R3 = R1R3/(R1+R3)=3,8*103*51*103(3,8*103+51*103)=3,5 кОм
Заключение
В курсовой работе был произведен синтез системы управления нестационарным динамическим объектом, получена ее структура. Данная система обеспечивает устойчивость и заданные показатели качества на интервале квазистационарности nT ≤ t ≤ (n+1)T при условии постоянства параметров объекта управления на этом интервале времени. При наличии изменений параметров объекта управления управляющее воздействие U(p), вырабатываемое регулятором (управляющим устройством) с жесткой отрицательной обратной связью, не обеспечивает устойчивости и заданных показателей качества квазистационарной системы. Для устранения этого недостатка необходимо вводить гибкую параметрическую обратную связь, т.к. управляющему устройству в этом случае необходима информация о параметрическом состоянии нестационарного объекта управления.
Литература
1.Чаковский В.В. и др. Методы систем управления. - Москва: Машиностроение, 1969. .Воронов А.А. и др. Теория автоматического управления. - Москва: Высшая Школа, 1977. .Нетушила А.В. Теория автоматического управления. - Москва: Высшая Школа, 1968.
.Володченко Г.С., Новгородцев А.И. Методические указания к комплексной курсовой работе «Построение информационно-управляющей системы с элементами искусственного интеллекта» по курсу «Элементы и системы автоматического управления и контроля». - Сумы, СумГУ, 1999.
|
||||||
|
|
Последнее изменение этой страницы: 2020-03-02; просмотров: 139; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.133.153.70 (0.015 с.) |