Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Типы архитектуры микропроцессорной системы
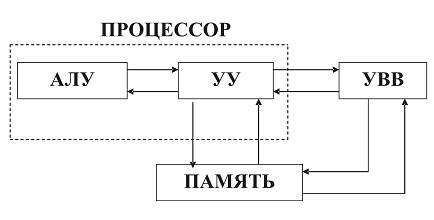
Микропроцессорная система (МПС) является универсальным вычислительным устройством; примером микропроцессорной системы является в частности персональный компьютер (ПК). МПС обрабатывает информацию, представленную только в числовой форме. Любая входная информация (данные) с этой целью преобразуется и кодируется в виде двоичных чисел. Устройство МПС, непосредственно выполняющее преобразование (обработку) данных, называется процессором. Микропроцессор – это процессор, выполненный в виде интегральной схемы сверхбольшой степени интеграции (СБИС). Структура и функции МПС видны из классической схемы Фон-Неймана, представленной на рисунке 1.1.
Рис.1.1. Структурная схема ЭВМ..
Эта архитектура была представлена Джоном фон-Нейманом еще в 1945 году и имеет следующие основные признаки. Машина состоит из блока управления, арифметико-логического устройства (АЛУ), памяти и устройств ввода/вывода. В ней реализуется концепция хранимой программы: программы и данные хранятся в одной и той же памяти. Выполняемые действия определяются блоком управления и АЛУ, которые вместе являются основой центрального процессора. Центральный процессор (CPU – central processor unit) выбирает и исполняет команды из памяти последовательно, адрес очередной команды задается "счетчиком адреса" в блоке управления. Этот принцип исполнения называется последовательной передачей управления. Данные, с которыми работает программа, могут включать переменные - именованные области памяти, в которых сохраняются значения с целью дальнейшего использования в программе. Использование микропроцессоров в системах управления имеет ряд особенностей по сравнению с использованием их в качестве ядра универсальной микроЭВМ - персонального компьютера (ПК). Персональный компьютер, используемый как для научно-технических расчетов, так и для многоцелевой обработки информации, ориентирован в первую очередь на взаимодействие с пользователем. Задача персонального компьютера обрабатывать данные по запросу пользователя, обеспечивая при этом удобный человеко-машинный интерфейс. Основная же задача управляющей микропроцессорной системы (МПС) состоит в том, чтобы на основании информации, получаемой от датчиков, вычислить и передать на исполнительные механизмы, управляющие воздействия. Как правило, управляющие МПС встраиваются в оборудование и настраиваются на конкретную область применения. Поэтому работают они уже по готовым программам, которые хранятся в ПЗУ.
Микропроцессоры в системах управления имеют другой тип архитектуры микропроцессорной системы — это гарвардская архитектура. Эта архитектура предполагает наличие в системе отдельной памяти для данных и отдельной памяти для команд. Обмен процессора с каждым из двух типов памяти происходит по своей шине. В однокристальных микроконтроллерах в основном применяется гарвардская архитектура с раздельными шинами. В состав управляющей МПС обязательно входят специальные блоки (контроллеры) для приема данных от датчиков состояния среды и объекта, а также для передачи управляющих воздействий на исполнительные механизмы. В этих блоках данные преобразуются к форме, которую понимает МПС. Микропроцессор работает с данными в цифровом виде, датчики выдают информацию, как правило, в аналоговом виде, для передачи управляющих воздействий также часто используют аналоговую форму, следовательно, требуется двустороннее цифроаналоговое преобразование, при котором каждому измеренному значению соответствует определенный цифровой код, с которым и работает МПС. Отличительной особенностью работы управляющих МПС является выполнение ими всех операций в реальном масштабе времени. Термин реальное время используют в тех случаях, когда требуется оперативно реагировать на входные сигналы, причем задержка реакций должна быть конечной и не превышать определенного значения. В различных приложениях этот термин определяется по-разному. В управляющих МПС вычисление управляющих воздействий за время, больше требуемого, приравнивается к получению неправильного результата, так как МПС должна оперативно управлять объектом. В общем случае микропроцессорная система управления может являться нижним уровнем распределенной системы управления и решать следующие задачи: · Принимать информацию от датчиков о состоянии окружающей среды объекта.
· Рассчитывать в реальном времени управляющие воздействия и передавать их на исполнительные механизмы · Отображать информацию о текущем состоянии системы оператору на дисплее · Принимать и обрабатывать команды оператора по изменению условий процесса управления. · Передавать и принимать информацию от других уровней управления. Особенностью управляющих МПС можно считать повышенное требование к надежности программного обеспечения, так как отказ может привести к серьезным последствиям в работе реальных устройств. Рассмотрим структуру микропроцессорной системы управления. Рис.1.2. Объект управления имеет контролируемые параметры Y, характеризующие его в каждый момент времени. Кроме того, объект управления существует не просто сам по себе, а в окружающей его среде, которая постоянно воздействует на его состояние. Эти воздействия окружающей среды можно разделить на три группы 1) Объективно существующие и наблюдаемые (вход объекта Х). 2) управляющие воздействия, с помощью которых происходит управление объектом (управляющий вход U0) 3) возмущения Е (не измеряемые параметры среды, и всякого рода случайные изменения объекта). Датчики состояния среды и состояния объекта вырабатывают сигналы Xn, Yn, которые могут быть аналоговыми, дискретными или цифровыми. Сигналы Un, управляющие исполнительными механизмами также могут быть разных видов. Ядро МПС обменивается с контроллерами и интерфейсными блоками только цифровыми сигналами Xb, Yb, Ub. Также цифровыми сигналами Xb, Yb, Zb но по специальным протоколам происходит обмен между интерфейсными блоками и периферией. Интерфейсные блоки предназначены для связи с объектом управления (например приводами и электроавтоматикой станка) и периферийным оборудованием; пульт оператора предназначен для выдачи команд в МПС на специальном языке. Измерительные контроллеры преобразуют и выдают в МПС в цифровом виде показания датчиков о состоянии объекта и среды. В состав интерфейсных блоков связи и контроллеров также могут входить микропроцессоры, в этом случае процессор ядра МПС освобождается от рутинных функций по вводу/выводу и предварительной обработки информации. Алгоритмы управления реализованы в виде программ, хранящихся в памяти МПС. При построении систем управления сложными объектами такой объект разбивается на части и для каждой части строится аналогичная система управления этой, затем каждая часть соединяется с МПС высшего уровня. .
Рис. 1.2.Структура микропроцессорной системы управления.
Классификация МП
И классическая архитектура фон-Неймана и гарвардская архитектура прошли длинный путь развития. В общем смысле под архитектурой процессора понимается его программная модель, то есть программно-видимые свойства. Под микроархитектурой понимается внутренняя реализация этой программной модели. Для одной и той же архитектуры разными фирмами и в разных поколениях применяются существенно различные микроархитектурные реализации. Сейчас существует множество архитектур процессоров, которые делятся на две глобальные категории - RISC и CISC. RISC - Reduced (Restricted) Instruction Set Computer - процессоры (компьютеры) с сокращенной системой команд. Эти процессоры обычно имеют набор однородных регистров универсального назначения, причем их число может быть большим. Система команд отличается относительной простотой, коды инструкций имеют четкую структуру, как правило, с фиксированной длиной. В результате аппаратная реализация такой архитектуры позволяет с небольшими затратами декодировать и выполнять эти инструкции за минимальное (в пределе 1) число тактов синхронизации. Определенные преимущества дает и унификация регистров.
CISC - Complete Instruction Set Computer - процессоры (компьютеры) с полным набором инструкций, к которым относится и семейство х86, на котором реализовано подавляющее большинство ПК. Состав и назначение их регистров существенно неоднородны, широкий набор команд усложняет декодирование инструкций, на что расходуются аппаратные ресурсы. Для выполнения инструкций процессора требуется различное и значительное число тактов.Процессоры х86 имеют сложную систему команд, во многом обусловленную необходимостью совместимости с программным обеспечением для IBM PC, имеющим уже 20-летнюю историю. Кроме того, в процессорах семейства х86, начиная с 486, применяется комбинированная архитектура - CISC-процессор имеет RISC-ядро. В рамках рассмотренных архитектур также различают следующие способы организации вычислительного процесса: один поток команд - один поток данных (Simple Instruction - Simple Data, SISD) - характерно для традиционной фон-неймановской архитектуры (иногда вместо Simple пишут Single); один поток команд - множественный поток данных (Simple Instruction - Multiple Data, SIMD) - технология MMX; множественный поток команд - один поток данных (Multiple Instruction - Simple Data, MISD); множественный поток команд - множественный поток данных (Multiple Instruction - Multiple Data, MIMD). В настоящее время различные фирмы (Intel, Motorola, Atmel, Microchip) выпускают обширную номенклатуру семейств микропроцессоров для различных областей применения. При этом используют несколько способов классификации микропроцессоров: по разрядности, архитектурным особенностям, семействам и т. д. Микропроцессоры, в частности делятся на четыре класса: · универсальные · сигнальные (DSP); · транспьютеры; · микроконтроллеры. Универсальные МП (Intel х86) используются в ЭВМ различного назначения: ПК, серверах, портативных ПК, больших ЭВМ и т. д. Они обладают высокой производительностью операций с фиксированной и плавающей точкой, обрабатывают данные большой разрядности, позволяют адресовать память большого объема, имеют высокие тактовые частоты, развитую систему команд и предназначены для работы на системную шину.
Сигнальные МП (DSP – digital signal processor) предназначены для обработки сигналов в реальном масштабе времени и решают типовые задачи вида: фильтрация, спектр-анализ, компрессия и т. д. Эти МП вытесняют аналоговые устройства аналогичного назначения в таких областях как радио, телевидение, связь, мультимедиа. Они имеют модифицированную гарвардскую архитектуру, меньшую разрядность данных, но у них есть набор специальных команд для цифровой обработки сигналов. Транспьютеры предназначены для построения параллельных вычислительных систем, в которых матрицы из N-однотипных МП работают с общим полем памяти. Межпроцессорные связи в этих структурах поддерживаются или сигнальными или коммутационными процессорами. Для параллельных структур разрабатываются специальные методы программирования, которые обеспечивают параллельную работу процессоров. Микроконтроллеры предназначены для встроенных систем управления и работе в реальном масштабе времени, обладают большой специализацией и разнообразием функций, различаются по параметрам и составу периферии, тактовые частоты низкие (до 20 МГц), разрядность 8 – 16 бит. Микроконтроллеры составляют основу автоматизации нижнего уровня. Все микропроцессоры выполняются в виде интегральной схемы сверхбольшой степени интеграции (СБИС). Обычно СБИС бывают выполнены по КМОП-технологии, что обеспечивает: малое потребление мощности, достаточно высокое быстродействие, высокую помехоустойчивость и широкий диапазон напряжения питания. Буферные каскады микропроцессоров выполняются по технологии ТТЛШ, что обеспечивает подключение большей нагрузки и более высокое быстродействие при работе на емкостную нагрузку. В виде СБИС также выпускаются программируемые логические матрицы различной архитектуры (ПЛИС). Они вместе с логическими микросхемами и микросхемами средней степени интеграции (СИС) используются для построения периферийных узлов МПС. В настоящее время проходит проверку технология, когда в границах одного кристалла возможно сочетание различных типов структур: CPU и ПЛИС.
|
||||||||
|
|
Последнее изменение этой страницы: 2017-02-07; просмотров: 779; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.137.161.155 (0.021 с.) |