Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Расчеты подтверждающие работоспособность и надежность изделия. ⇐ ПредыдущаяСтр 3 из 3
Выбор электродвигателя. Конкретный двигатель из намеченной серии выбирают с учётом расчётной (потребной) мощности двигателя, которая должна быть достаточна для перемещения нагрузки в соответствии с техническим заданием. Порядок определения расчётной мощности двигателя зависит от параметров нагрузки и компоновочной схемы электромеханического привода. Расчётная мощность электродвигателя определяется по формуле:
Мощность нагрузки
Исходя из технического задания, частота вращения выходного вала равна:
В итоге получим Выберем двигатель УВ–705–ВС: коллекторный, однофазный, последовательного возбуждения. Применяются в механизмах, требующих большого пускового момента. Направление вращения вала – левое. Режим работы – повторно-кратковременный (S3), продолжительность одного цикла – 8 с, рабочего периода – 5 с. Допустимое количество циклов – 10. Таблица 1 Технические параметры.
Габаритные, установочные и присоединительные размеры двигателя показаны на рисунке 5.1.
Рисунок5.1-Габаритные, установочные и присоединительные размеры двигателя Условия эксплуатации. Эксплуатируется в невзрывоопасной окружающей среде, не содержащей токопроводящей пыли в концентрациях, снижающих параметры двигателя в недопустимых пределах. Степень защиты двигателей IP10 по ГОСТ 20494-92. Способ охлаждения двигателей ICO1 по ГОСТ 20459-75. Конструкция электродвигателей по технике безопасности отвечает ГОСТ 12.2.007.0-75 и ГОСТ 12.2.007.1-75. По способы защиты человека от поражения электрическим током двигатель соответствует классу 01 ГОСТ 12.2.007.0-75. Средняя наработка двигателя 720 часов. Гарантийный срок службы 2,5 года.
Кинематический расчёт.
Так как торсион имеет поворот в
Расчёт упругого элемента. В качестве примера прочностного расчёта приведём расчёт торсиона (Рисунок 5.3).
Рисунок 5.3 – Расчётная схема. Максимальное напряжение сдвига (на периферийных волокнах сечения):
М = 600 Н∙м – действующий на торсион момент; d – диаметр рабочего участка торсиона; l – рабочая длинна торсиона. Для стали 65Г примем максимальное напряжение сдвига τ = 310 МПа:
Принимая рабочую длину торсиона l равной 53 мм, получим угол закручивания торсиона:
Таким образом угол закручивания торсиона:
Расчёт на точность. Погрешность измерения в общем случае состоит из: 1). Погрешность торсиона; 2). Погрешность схемы; 3). Погрешность индуктивного датчика и электрической схемы его включения; 4). Температурная погрешность; 5). Погрешность измерительного усилия; 6). Погрешность положения датчика; 7). Погрешность от смещения точки приложения силы.
Погрешность торсиона связана с наличием упругого гистерезиса, который изначально учитывается при его градуировке.
Погрешность схемы возникает из-за нелинейности преобразования вращательного движения в поступательное. Для преобразования вращательного движения втулки в поступательное перемещение наконечника индуктивного преобразователя применён тангенсный механизм (рисунок 5.4.1).
Рисунок 5.4.1 – Схема тангенсного механизма. Ведущим звеном является рычаг 2. Функция преобразования данного механизма имеет вид:
а – расстояние между осью А и направлением движения толкателя. Идеальная функция преобразования:
k – коэффициент пропорциональности. Погрешность схемы
Предел перемещения наконечника индуктивного преобразователя:
Согласно паспорту преобразователя предел погрешности индуктивного датчика модели 75501 нулевого класса точности при диапазоне измерений ±1000 мкм и шаге дискретности 1 мкм составляет 4 мкм.
Для устранения температурной погрешности регулируемый моментный ключ выдерживают некоторое время в лабораторных условиях при температуре 20±2ºС.
Влияние погрешности измерительного усилия пренебрежимо мало (0,7Н) и расчёте суммарной погрешности не учитывается.
Для определения влияния погрешности положения датчика в осевом направлении обратимся к рисунку 5.4.2 иллюстрирующим действие этой погрешности.
Рисунок 5.4.2 – Схема для расчёта погрешности. Минимальное перемещение винта Δ равно:
S – предел измерения; Действие Δ на перемещение наконечника преобразователя (рисунок 5.4.3).
Рисунок 5.4.3 – Схема для расчёта погрешности.
Действие погрешности неперпендикулярности оси преобразователя и оси торсиона (рисунок 5.4.4).
Рисунок 5.4.4 – Схема для расчёта погрешности.
Схема действия погрешности показана на рисунке 5.4.5.
Рисунок 5.4.5 – Схема для расчёта погрешности
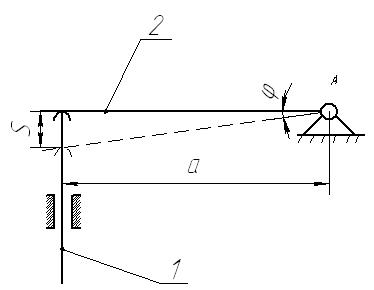
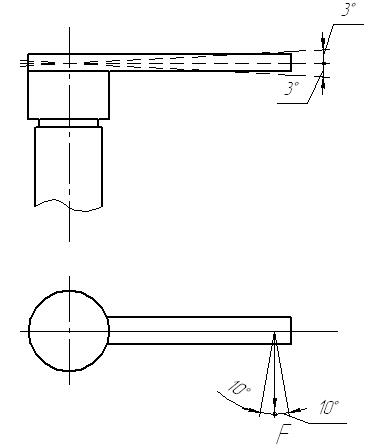
По данным исследований проведенных в «Уральском научно-исследовательском институте метрологии» (исследования проводились при подготовке проекта стандарта «Ключи моментные. Общие технические условия» ГОСТ Р 51254-99) погрешность от смещения точки приложения силы в режиме работы по сравнению с режимом калибровки (поверки) для ключей с упругими телами кручения может не учитываться при соблюдении требований показанных на рисунках 5.4.6 и 5.4.7.
Рисунок 5.4.6 – Ось ключа горизонтальна.
Рисунок 5.4.7 – Ось ключа вертикальна.
Таким образом суммарная ожидаемая погрешность:
Приведённая погрешность прибора:
Класс точности прибора:
Спроектированный в данном курсовом проекте прибор удовлетворяет заданному классу точности 2. Расчёт на надёжность.
Исходным данными для уточненного расчета надежности являются: - принципиальная кинематическая схема; - интенсивности отказов механических узлов; - условия эксплуатации; - режимы работы; Заполняем графы таблицы 6.4,
Таблица 6.4 К уточненному расчету надежности
Интенсивность отказов в реальных условиях равна:
Суммарная интенсивность отказов устройства:
Среднее время безотказной работы устройства:
Вероятность безотказной работы системы за время t = 7680ч. (t —межповерочный интервал):
Литература. 1. Орлов П. И. “Основы конструирования ”. 2. Андреев Л. Е. ”Упругие элементы приборов ”. 3. Соломахо В.Л., Томилин Р.И. и др. Справочник конструктора-приборостроителя. Проектирования. Основные нормы. Мн: Высш. шк., 1998 – 272с., т. 1,2. 4. Анурьев В. И. Справочник конструктора-машиностроителя в 3 томах. Машиностроение, 2001. 5. ГОСТ 24372 – 80 ”Ключи гаечные торцовые механизированные со сменными головками ”. Издательство стандартов, 1984.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-06-23; просмотров: 677; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.191.135.193 (0.032 с.) |
 , где
, где - мощность нагрузки на выходном валу;
- мощность нагрузки на выходном валу; - КПД цепи двигатель-нагрузка.
- КПД цепи двигатель-нагрузка. , где
, где - КПД втулочных муфт;
- КПД втулочных муфт; - КПД червячного двухступенчатого редуктора.
- КПД червячного двухступенчатого редуктора.
 , где
, где - момент нагрузки на выходном валу, Н∙м;
- момент нагрузки на выходном валу, Н∙м; - угловая скорость вращения выходного звена, рад/с;
- угловая скорость вращения выходного звена, рад/с; - частота вращения выходного звена, об/мин.
- частота вращения выходного звена, об/мин. , где
, где - частота вращения двигателя (
- частота вращения двигателя ( );
); - передаточное отношение редуктора (i = 920).
- передаточное отношение редуктора (i = 920). ;
;

 т.е. на 0,03рад за 2 сек или 0,015рад в сек., то
т.е. на 0,03рад за 2 сек или 0,015рад в сек., то об/мин.
об/мин.
 , где
, где ;
; , где
, где - модуль сдвига для стали 65Г.
- модуль сдвига для стали 65Г. .
.
 , где
, где , где
, где равна:
равна: .
.

 , где
, где - шаг винта;
- шаг винта; - минимальный угол на который человек, использующий отвёртку, может повернуть винт.
- минимальный угол на который человек, использующий отвёртку, может повернуть винт. .
. .
.


 , где
, где - допуск перпендикулярности;
- допуск перпендикулярности;

 , где
, где - предел измерения.
- предел измерения.
 ,
, 6мкм.
6мкм. , где
, где - абсолютная погрешность,
- абсолютная погрешность, = 600 Нм - нормирующее значение.
= 600 Нм - нормирующее значение. Нм.
Нм.
 - температура рабочая;
- температура рабочая;  - коэффициент нагрузки;
- коэффициент нагрузки;  - коэффициент учитывающий влияние окружающей среды;
- коэффициент учитывающий влияние окружающей среды;  - коэффициент учитывающий влияние числа переключений
- коэффициент учитывающий влияние числа переключений






 .
.