Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Технічна характеристика ЕВМ МЕО-1,6Содержание книги
Поиск на нашем сайте ЕВМ постачений гальмом, ручним приводом, блоком датчиків і кінцевих вимикачів. Його технічні дані наведені в табл.3. У механізмах типів МЕО-1,6, що виробляе СЗЕИМ, як привод використовується мало інерційний асинхронний електродвигун типу ДАУ-4. Зубчаста передача редуктора складається із прямозубих циліндричних коліс, що забезпечують необхідне передаточне відношення. ЧЗЕИМ випускає ці механізми, побудовані на базі синхронного редукторного двигуна типу ДСР і черв'ячної передачі. Ці механізми оснащені блоками сигналізації положення й мають підвищену надійність і збільшений термін служби. Як датчики зворотного зв'язку в ЕИМ використовуються блоки типів БДИ-6, БДР-П, БСПТ, БСПИ.
Т а б л и ц я 3 Технічна характеристика ЕВМ МЕО-1,6/25-0,63
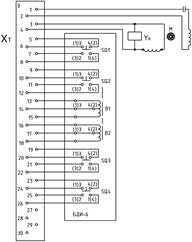
Принципова електрична схема механізму МЕО-1,6. наведена на рис.18.
Рис. 18. Принципова електрична схема механізму типу МЕО-1,6: В1 й В2 — датчики індуктивні; YB — електромагнітне гальмо; SQ1—SQ4 — кінцеві вимикачі; XT— клемник; М — електродвигун
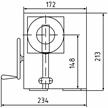
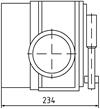
Габаритні розміри цього механізму наведені на рис.19. Механізми, що випускають СЗЕИМ, оснащуються блоками сигналізації положення з індуктивним (БДИ-6) або реостатним (БДР-П) датчиком положення вихідного органа. Блок сигналізації положення типу БДИ-6 складається із двох індуктивних датчиків переміщення, профільного кулачка, чотирьох мікровимикачів із чотирма кулачками. Індуктивний датчик складається із двох однакових котушок, у полі яких переміщається сердечник.
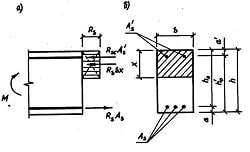
Рис.19. Габаритне креслення механізмів типів МЕО-1,6 ТЕХНІЧНІ ДАНІ блоку сигналізації положення типу БДИ-6 Робочий хід сердечника датчика, мм 5 Вихідний сигнал, мВ не менш 625 Нелінійність, % не більше 3 Живлення від джерела постійного струму: напруга, В 12 частота, Гц 50 Блок сигналізації положення типу БДР - відрізняється від описаного вище блоку тим, що в ньому замість індуктивних датчиків використають чотири реостати зі струмознімачем і контактними кільцями. Передбачено роботу на двох реостатах у діапазоні кутів 0-90° або 0-240°. Керування механізмами здійснюється тільки від контактної апаратури. Порядок виконання роботи 1. Вивчити принцип роботи й конструкцію електричного виконавчого механізму МЕО-1,6, використовуючи опис і реальну конструкцію механізму, застосовуваного в лабораторній установці. При відсутності подачі живлення мережі оцінити вручну рухливість вихідного важеля ВМ при повороті, зусилля страгивания з початкового положення.
2. Підготувати ВМ до роботи, для чого: -перевірити підключення приладу регулюючого Р25.1 й індикатора положення виконавчого механізму; - установити зони безпеки при роботі механізму; - увімкнути електроживлення, натиснувши кнопку МЕРЕЖА. На пульті загоряється лампочка МЕРЕЖА; - поставити перемикач режимів у положення РУЧНА РОБОТА; - у режимі РУЧНЕ КЕРУВАННЯ перевірити роботу механізму, зробивши 5 - 6 повторень на кожному русі, рухи повинні виконуватися без збоїв і затирань.
3. Послідовно в режимі ручного керування забезпечити 5-6 ратне виконання команд прямого й зворотного напрямків руху, вимірюючи величину ходу й час виконання рухів. Розрахувати швидкість виконання рухів. Визначити диференціал ходу.
4. Переміщаючи вихідний важіль у крайні положення спостерігати включення світлодіодів, і, вимірюючи положення важеля, визначити диференціал ходу при вимиканні механізму. 5. Установлюючи задатчиком величини переміщень спостерігати їхнє відпрацьовування й реєструвати точність переміщень. Побудувати графік зміни точності переміщень залежно від величини ходу.
6. Установити перемикач у режим АВТОМАТ. Установлюючи задатчиком величини переміщень спостерігати їхнє відпрацьовування й реєструвати точність переміщень. Побудувати графік зміни точності переміщень залежно від величини ходу. 7. Результати випробувань систематизувати й оформити у виді таблиць і графіків. Зміст звіту 1. Назва й мета роботи. 2. Ескіз виконавчого механізму МЕО 1,6 і його технічна характеристика. 3. Технічна характеристика блоку сигналізації положення типу БДИ-6. 4. Принципова електрична схема механізму МЕО-1,6. 5. Протокол перевірки основних характеристик виконавчого механізму, розрахункові формули, графіки й результати розрахунку. 6. Аналіз результатів і виводи. Контрольні запитання 1. Приведіть основні модифікації ВМ МЕО-1,6. 2. Які функції виконують ВМ МЕО-1,6? 3. Пояснити призначення органів керування ВМ МЕО-1,6. 4. Які блоки входять до складу ВМ МЕО-1,6 і для чого вони 5. Поясніть роботу механізмів на наведених ескізах. 6. Поясніть призначення елементів на наведеній електричній схемі. 7. Поясніть порядок проведення випробувань. Л А Б О Р А Т О Р Н А Р О Б О Т А 7 Вивчення і дослідження роботи вібраційного М е т а р о б о т и: вивчення принципу роботи ВБЖ, проведення аналізу зміни продуктивності живильника від режимів роботи.
|
||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-10; просмотров: 272; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.230 (0.009 с.) |