Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Синтез разомкнутой сар с пи - регуляторомСодержание книги Поиск на нашем сайте Для определения устойчивости замкнутой системы с ПИ-регулятором согласного критерию Найквиста записывают передаточную функцию разомкнутой системы автоматического регулирования:
Передаточная функция разомкнутой системы с ПИ-регулятором примет вид:
Для определения устойчивости замкнутой системы с ПИД-регулятором согласного критерию Найквиста записывают передаточную функцию разомкнутой системы автоматического регулирования:
Передаточная функция разомкнутой системы с ПИД-регулятором примет вид:
Оценка устойчивости САР Запас устойчивости по амплитуде и по фазе системы с ПИ-регулятором Для определения устойчивости замкнутой системы с ПИ-регулятором согласного критерия Найквиста запишем передаточную функцию разомкнутой системы автоматического регулирования.
где
Построение АФЧХ разомкнутой системы с ПИ- регулятором в Mathcad показано на рисунке 6.1
Рисунок 6.1 - АФЧХ разомкнутой САР с ПИ-регулятором
По АФЧХ разомкнутой системы с ПИ - регулятором можно сделать вывод, что замкнутая система с ПИ-регулятором является устойчивой по критерию Найквиста. Проведя дополнительные построения, определим: запас устойчивости по амплитуде составляет A=l/U=1/0,39=2,564 по фазе запас устойчивости Q=53°.
6.3.2 Для определения устойчивости замкнутой системы с ПИД-регулятором согласного критерию Найквиста запишем передаточную функцию разомкнутой системы автоматического регулирования.
где
Построение АФЧХ разомкнутой системы с ПИД-регулятором в Mathcad показано на рисунке 6.2
Рисунок 6.2 - АФЧХ разомкнутой системы с ПИД-регулятором.
Определение показателей качества Управления замкнутой САР
Различают 4 группы критериев качества регулирования: – критерии точности - используют величину ошибки в различных типовых режимах; – критерии величины запаса устойчивости - оценивают удаленность САР от границы устойчивости; – критерии быстродействия - оценивают быстроту реагирования САР на появление задающего и возмущающего воздействий; – интегральные критерии - оценивают обобщенные свойства САР: точность, запас устойчивости, быстродействие. Прямые оценки качества: 1 Установившееся значение выхода, определяющее статическую точность системы:
2 tp – время переходного процесса, определяющее быстродействие системы. Оно определяется из соотношения:
где ∆ - заданная малая величина, характеризующая точность системы. ∆ предварительно задается в процентах от установившегося значения hуст, где нет определенных требований – принимают ∆%=5%. 3
Обычно требования по перерегулированию составляют σ=10..30%, иногда к качеству процессов может быть предъявлено требование σ=0%, например в системах позиционирования манипуляторов промышленных роботов. 4 ω – частота колебаний.
где Т – период колебаний для колебательных процессов. 5 N – это число полных колебаний, которое имеет h(t) или e(t) за время регулирования tp. Этот параметр определяется как число выбросов. Обычные требования по числу колебаний N =1..2, в некоторых системах накладываются ограничение на колебательность N =0, например, в системах с существованием люфтом в механических передачах. 6 tm – время достижения первого максимума. 7 tk – время нарастания переходного процесса, время начала переходного процесса до момента первого пересечения графиком линии установившегося значения.
Для построения в MathCad переходной функции объекта управления с целью определения показателей качества необходимо записать передаточную функцию замкнутой САР. В общем виде эта функция будет выглядеть следующим образом:
При нахождении переходной функции замкнутой системы в MathCad следует учитывать, что в знаменателе передаточной функции
Передаточная функция замкнутой САР уровня с ПИ-регулятором:
График переходной функции замкнутой АСР температуры с ПИ-регулятором показан на рисунке 7.1.
Рисунок 7.1 – Переходная функция замкнутой системы автоматического регулирования с ПИ-регулятором
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-09; просмотров: 666; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.217.39 (0.007 с.) |

 .
.
 ,
,
 ,
,
 .
.
 6.2 Синтез разомкнутой САР с ПИД-регулятором
6.2 Синтез разомкнутой САР с ПИД-регулятором .
.
 ,
,
 ,
,
 .
.
 ,
,
 ,
,
 – передаточная функция объекта управления;
– передаточная функция объекта управления; – передаточная функция разомкнутой системы;
– передаточная функция разомкнутой системы; – передаточная функция ПИ-регулятора.
– передаточная функция ПИ-регулятора.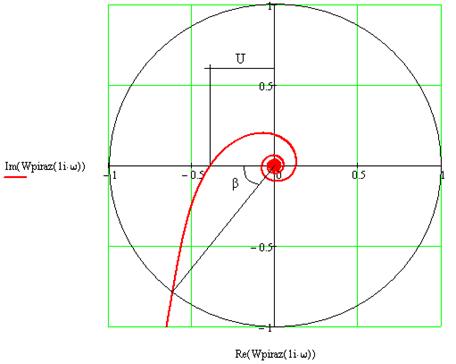
 Запас устойчивости по амплитуде и фазе системы с ПИД-регулятором
Запас устойчивости по амплитуде и фазе системы с ПИД-регулятором ,
,
 ,
,
 – передаточная функция разомкнутой системы;
– передаточная функция разомкнутой системы; – передаточная функция ПИД-регулятора.
– передаточная функция ПИД-регулятора.
 По АФЧХ разомкнутой системы с ПИД-регулятором можно сделать вывод, что замкнутая система с ПИД-регулятором является устойчивой по критерию Найквиста. Проведя дополнительные построения, определим: запас устойчивости по амплитуде составляет A=l/U=1/0,51=1,96 по фазе запас устойчивости Q=35°.
По АФЧХ разомкнутой системы с ПИД-регулятором можно сделать вывод, что замкнутая система с ПИД-регулятором является устойчивой по критерию Найквиста. Проведя дополнительные построения, определим: запас устойчивости по амплитуде составляет A=l/U=1/0,51=1,96 по фазе запас устойчивости Q=35°.
 .
.

 σ – перерегулирование – максимальное отклонение от установившегося значения, выраженное в относительных единицах или процентах.
σ – перерегулирование – максимальное отклонение от установившегося значения, выраженное в относительных единицах или процентах. .
.
 ,
,
 7.1 Построение переходной функции замкнутой САР с ПИ-регулятором по ее передаточной функции
7.1 Построение переходной функции замкнутой САР с ПИ-регулятором по ее передаточной функции .
.
 требует разложения в ряд Тейлора. Формула имеет вид:
требует разложения в ряд Тейлора. Формула имеет вид: .
.
 .
.



 h(t) – расход, м3/час; t – время, с.
h(t) – расход, м3/час; t – время, с.