Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Обоснование конструктивных параметров бесприводного ротационного рабочего органаСодержание книги
Поиск на нашем сайте
Особенностью бесприводных ротационных рабочих органов является то, что зона деформации почвы пальцем зависит от траектории его движения. Так как при перекрытии площадей обработанных участков почвы соседних пальцев одной секции увеличиваются затраты энергии на обработку почвы, появляется опасность излишнего её распыления, а также создаются условия для забивания пальцев почвой и растительными остатками, то в первом приближении необходимо определить количество пальцев, при котором площади обработанных участков почвы соседними пальцами соприкасаются (рис. 3.33). Длина отрезка АВ равна разности двух координат положения пальца:
где А – точка входа пальца в почву; В – точка выхода пальца из почвы.
Рисунок 3.33 – Расчётная схема для определения количества пальцев одной секции ротационного рабочего органа
где
Так как
С другой стороны, длина участка почвы, обработанного одним пальцем за один оборот секции рабочего органа определяют по зависимости:
где
Рисунок 3.34 – Зависимость угла входа пальца в почву от угла наклона оси вращения секции рабочего органа
Приравняв зависимости (3.63) и (3.64), получим зависимость, определяющую количество пальцев одной секции:
Рисунок 3.35 – Зависимость количества пальцев одной секции от глубины обработки почвы (при R=0,7м): 1 – при α = 0,175 рад; 2 – α = 0,35 рад; 3 – α = 0,525 рад Таким образом, проведя математическую обработку зависимости (3.65), получим, что при обработке почвы на глубину более 20 см (по агротеребованиям для картофеля) количество пальцев одной секции рабочего органа должно быть не менее 12 шт (рисунки 3.35, 3.36).
Рисунок 3.36 – Зависимость количества пальцев одной секции от угла наклона секции рабочего органа (при R=0,7м): 1 – при а = 0,2 м; 2 – а = 0,25 м; 3 – α = 0,3 м
Радиус секции рабочего органа можно определить из условия:
где
Для исключения огрехов в обработанном слое почвы длина оси вращения секции рабочего органа «с» (см. рисунок 2.2) должна быть не более зоны боковой деформации почвы пальцем (рисунок 3.34). Величина боковой деформации почвы пальцем [21] определяется из зависимости:
где а - максимальная глубина входа пальца в почву, м; dп – диаметр пальца, м;
Рисунок 3.37 – Угол плоскости сдвига почвы
Для определения минимального угла α, при котором траектории пальцев смежных секций рабочего органа будут пересекаться, воспользуемся расчётной схемой изображённой на рисунке 3.37. Приняв с = bI, получим:
При дальнейшем изменении угла наклона оси вращения секции рабочего органа К моменту вхождения пальца в почву рабочий орган повернётся на угол Текущая глубина входа пальца в почву определяется из выражения:
Рисунок 3.38 – Расчётная схема для определения глубины входа пальца секции рабочего органа Величина
Рисунок 3.39 – Зависимость глубины входа пальца в почву от угла поворота секции рабочего органа (при R=0,7 м и а=0,25 м): 1 – при α = 0,175 рад (10 град); 2 – α = 0,35 рад (20 град); 3 – α = 0,525 рад (30 град)
Очевидно, что при увеличении углов наклона секций рабочего органа, его ширина захвата тоже будет увеличиваться, что наглядно видно на рисунке 3.40. Ширина захвата секции рабочего органа определяется по зависимости:
Рисунок 3.40 – Зависимость ширины захвата рабочего органа от угла наклона оси вращения секции: 1 – при а = 0,2 м; 2 – а = 0,25 м; 3 – α = 0,3 м
Диаметр пальца определялся из условия прочности стального стержня круглого поперечного сечения на изгиб при максимальной изгибающей нагрузке, для чего на основе известных зависимостей и полученных аналитических выражений для определения конструктивных параметров предлагаемого ротационного рабочего органа были получены аналитические зависимости, позволяющие раскрыть взаимосвязь энергетических показателей работы рабочего органа с его конструктивными параметрами и режимами работы. Расчёт диаметра пальца проводился в программной среде SolidWorks (приложение 1).
|
||||
|
|
Последнее изменение этой страницы: 2016-12-14; просмотров: 628; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.217.39 (0.009 с.) |

 (3.58)
(3.58)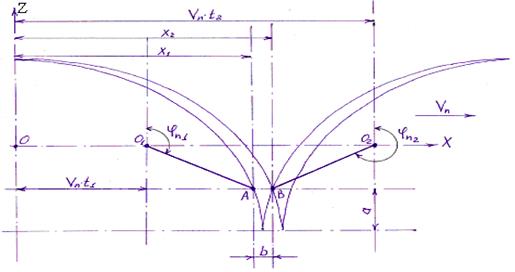
 (3.59)
(3.59) (3.60)
(3.60) и
и  - соответственно углы входа и выхода пальца из почвы:
- соответственно углы входа и выхода пальца из почвы: (3.61)
(3.61) (3.62)
(3.62) , м/с и
, м/с и  , с, то зависимость, определяющую длину отрезка АВ (м) можно записать в виде:
, с, то зависимость, определяющую длину отрезка АВ (м) можно записать в виде: (3.63)
(3.63) (3.64)
(3.64) - длина участка почвы, обработанного одним пальцем за один оборот секции рабочего органа, м;
- длина участка почвы, обработанного одним пальцем за один оборот секции рабочего органа, м; - параметр кинематического режима работы ротационного рабочего органа (для бесприводных рабочих органов данный параметр близок к единице).
- параметр кинематического режима работы ротационного рабочего органа (для бесприводных рабочих органов данный параметр близок к единице).
 (3.65)
(3.65)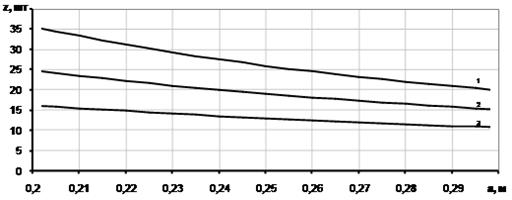

 (3.66)
(3.66) - высота стерни или неровностей поля (почвенные комки, глыбы, камни, растительные остатки и т.д.), м;
- высота стерни или неровностей поля (почвенные комки, глыбы, камни, растительные остатки и т.д.), м; - диаметр ступицы секции, на которой закреплены пальцы, м.
- диаметр ступицы секции, на которой закреплены пальцы, м. (3.67)
(3.67) - угол плоскости сдвига почвы (по рекомендациям В.И.Виноградова) (рисунок 3.37);
- угол плоскости сдвига почвы (по рекомендациям В.И.Виноградова) (рисунок 3.37);  - угол внутреннего трения почвы;
- угол внутреннего трения почвы;  - угол трения почвы по металлу.
- угол трения почвы по металлу.
 (3.68)
(3.68) и при соблюдении требуемой глубины обработки почвы рабочим органом изменяется глубина погружения (длина участка пальца, погружённая в почву) пальца в почву. Зависимость, определяющую текущее значение глубины входа пальца в почву, можно получить, если отнести движение рабочего органа к системе координат ZOX (рисунок 3.38).
и при соблюдении требуемой глубины обработки почвы рабочим органом изменяется глубина погружения (длина участка пальца, погружённая в почву) пальца в почву. Зависимость, определяющую текущее значение глубины входа пальца в почву, можно получить, если отнести движение рабочего органа к системе координат ZOX (рисунок 3.38). (3.69)
(3.69)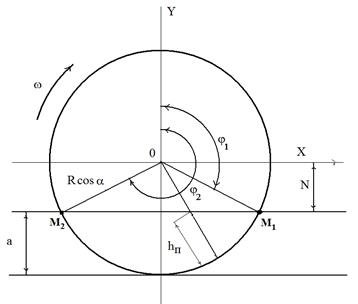
 - имеет место (отлична от нуля) только в том случае, если угол поворота рабочего органа находится в пределах
- имеет место (отлична от нуля) только в том случае, если угол поворота рабочего органа находится в пределах  (т.е. когда палец находится в почве) (рисунок 3.39).
(т.е. когда палец находится в почве) (рисунок 3.39).
 (3.70)
(3.70)