Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Под редакцией А. А. РадионоваСодержание книги
Поиск на нашем сайте ВВЕДЕНИЕ В МЕХАТРОНИКУ
Под редакцией А.А. Радионова
Утверждено Редакционно-издательским советом университета в качестве учебного пособия
Магнитогорск, 2009 УДК [621.3+681.5] (078)
Рецензенты: д октор технических наук, профессор, декан энергетического факультета ГОУ ВПО “Магнитогорский государственный технический университет им. Г.И. Носова” А.С. Карандаев; доктор технических наук, профессор, декан механико-машиностроительного факультета ГОУ ВПО “Магнитогорский государственный технический университет им. Г.И. Носова” Л.Е. Кандауров; кандидат технических наук, доцент, заведующий кафедрой прикладной информатики и управляющих систем автоматики Новотроицкого филиала ФГОУ ВПО “Московский государственный институт стали и сплавов (технологический университет)” С.Н. Басков
Авторы: Белый А.В., Линьков С.А., Малахов О.С., Радионов А.А.
Введение в мехатронику: Учебное пособие / А.В. Белый, С.А. Линьков, О.С. Малахов и др.; под ред. А.А. Радионова. – Магнитогорск: ГОУ ВПО “МГТУ”, 2009. – 71 с.
Рассмотрены основы теории и принципы построения промышленных мехатронных систем. Представлены физические основы функционирования элементов мехатронных модулей – исполнительных электро- и гидроприводов, силовых электронных преобразователей, гидроаппаратов и различных передач преобразователей движения. Приведено общее представление об управлении мехатронными модулями и системами. Учебное пособие предназначено для студентов высших учебных заведений, обучающихся по специальности “Мехатроника” направления подготовки “Мехатроника и робототехника”. Может быть полезно для студентов других технических направлений, интересующихся проблемами мехатронных систем и модулей.
УДК [621.3+681.5] (078)
ОГЛАВЛЕНИЕ
ПРЕДИСЛОВИЕ Предлагаемое вниманию читателей учебное пособие представляет собой конспект лекций, разработанный в соответствии с Государственным образовательным стандартом Российской Федерации специальности 220401 – Мехатроника и Рабочей программой по дисциплине “Введение в мехатронику” для студентов Магнитогорского государственного технического университета. Поскольку учебное пособие написано в виде конспекта лекций, материал тематически объединен и изложен в объеме, позволяющем рассматривать его в течение двух академических часов. Количество лекций рассчитано на изучение дисциплины в течение одного семестра (18 недель). Материал лекций разбит на введение и на четыре главы. Во введении дается понятие мехатроники, приведено описание структуры мехатронной системы, принципов интеграции ее элементов. Сформулированы задачи подготовки инженеров-мехатроников, дано описание учебного плана, реализуемого в Магнитогорском государственном техническом университете. В первой и во второй главах приведено описание исполнительных двигателей мехатронной системы. Достаточно подробно рассмотрены устройство, принцип действия и статические характеристики как электрических двигателей углового движения (постоянного тока, асинхронных и синхронные двигателей), линейных электродвигателей, так и гидроприводов. Приведены общие принципы работы силовых преобразователей электрической энергии. В третьей главе дано описание кинематики различных преобразователей движения (зубчатых, червячных, передач с гибкими связями, винт-гайка). Четвертая глава посвящена рассмотрению общих вопросов управления мехатронными системами и модулями. Вопросы курса изложены с учетом наличия знаний у студентов дисциплин “Физика” и “Математика” программы средней общеобразовательной школы и не требует специальной подготовки. Лекции не содержат ссылок на литературу, однако все литературные источники, которые авторы использовали при написании пособия, приведены в конце книги. Поэтому при возникновении каких-либо вопросов в процессе изучения курса студентам необходимо пользоваться указанной литературой. Авторы надеются, что настоящее учебное пособие окажет достойную помощь студентам при изучении соответствующего курса, а также будет полезно в их дальнейшей профессиональной деятельности. Понимая, что материал пособия может быть изложен в более доступной форме, авторы с благодарностью примут все замечания по его содержанию, которые следует направлять по адресу: 455000, г. Магнитогорск, пр. Ленина, 38, МГТУ, кафедра “Автоматизированного электропривода и мехатроники”, или на e-mail: RadionovAA@rambler.ru. ВВЕДЕНИЕ Мехатроника является новой динамично развивающейся отраслью науки и техники. Она базируется на знаниях и достижениях в областях механики, электротехники, электро- и гидропривода, электроники, теории автоматического регулирования и цифрового компьютерного управления. Историю мехатроники принято отсчитывать с 1969 года, когда японская фирма Yaskawa Electric ввела новый термин “МЕХАТРОНИКА” как комбинацию слов “МЕХАника” и “элекТРОНИКА”. В 1972 году эта фирма зарегистрировала термин Mechatronics как товарный знак.
В.1. Понятие “мехатроника” В настоящее время мехатроника как наука находится на стадии становления, поэтому ее определение и базовая терминология еще не полностью сформирована. Известно несколько определений, опубликованных в периодических изданиях, трудах международных конференций и симпозиумах, на основе которых в Государственном образовательном стандарте РФ 2000 года определена следующая трактовка: “ Мехатроника – область науки и техники, основанная на синергетическом объединении точной механики, электротехники, электроники и интеллектуального управления, обеспечивающая проектирование и производство качественно новых модулей, машин и систем с управлением их функциональными движениями ”.
Основные понятия и законы электротехники Первопричиной всех электрических явлений в природе являются электрические заряды, носители которых – электроны содержатся в каждом атоме любого вещества. Именно упорядоченное движение электронов и определяет протекание электрического тока. Электрической цепью называется совокупность устройств, образующих путь для электрического тока. Среди электротехнических устройств различают источники, приемники и проводники электрической энергии (рис. 1.1). Предположим, что через участок электрической цепи (приемник энергии) под воздействием приложенного от источника энергии напряжения u проходит электрический заряд q, тогда численно мгновенное значение тока за промежуток времени dt, величина которого стремится к нулю, определится как
а совершаемая при этом элементарная работа в виде
или с учетом (1.1)
По сути, элементарная работа соответствует элементарной энергии, производная по времени которой представляет собой мгновенную мощность
определяемую с учетом (1.2) и (1.3) как
Из выражения (1.5) следует, что мгновенная мощность электрической энергии положительна при одинаковых знаках u и i и отрицательна при разных знаках. Если р>0, то энергия поступает в устройство (приемник), если р<0, то энергия вырабатывается устройством (источник). Для передачи электрической энергии на расстояния используют трехфазный переменный ток (рис. 1.2). В такой системе электрических цепей действуют три синусоидальных напряжения одной и той же частоты
сдвинутых относительно друг друга на
В практике применения систем переменного тока широко используют понятие действующего значения электрической величины – ее среднеквадратичного значения за период
При условии, что
аналогично
Физическая сущность действующего значения может интерпретироваться следующим: в нагрузке, к которой приложено синусоидальное напряжение амплитудой Um выделится такое же количество энергии, которое выделилось бы при приложении к ней постоянного напряжения величиной U. Все электрические цепи состоят из компонентов (резисторов, конденсаторов, катушек индуктивности, диодов, тиристоров, транзисторов, электрических двигателей и др.), которые характеризуются величинами электрического сопротивления, емкости и индуктивности. Величина сопротивления R участка цепи определяется по закону Ома (1826 г.)
В приведенном выражении предполагается, что положительные направления тока и напряжения совпадают, т.е. величина сопротивления всегда имеет положительное значение. Индуктивность L – идеализированный элемент электрической цепи, в котором происходит накопление энергии магнитного поля. Индуктивность определяется как отношение потокосцепления самоиндукции к току в данном элементе
Как и сопротивление, величина индуктивности всегда имеет положительный знак. На основании закона электромагнитной индукции Фарадея-Максвелла изменение потокосцепления самоиндукции вызывает электродвижущую силу (э.д.с.) самоиндукции
Знак минус учитывает противодействие этой э.д.с. изменению потокосцепления. Поскольку величина индуктивности L не зависит от тока i, то выражение (1.13) с учетом (1.11) примет вид
Величина
называется падением напряжения на индуктивности. В соответствии с (1.14) ток в индуктивности определится по зависимости
Таким образом, из приведенных рассуждений следует, что под действием внешних факторов напряжение, прикладываемое к индуктивности, может изменяться мгновенно, а изменение тока в ней будет происходить при этом в течение некоторого времени. Емкостью C называют идеализированный элемент электрической цепи, в которой осуществляется накопление электрического поля. Емкость является количественной оценкой отношения заряда к напряжению на элементе
Поскольку заряд и напряжение имею один знак, то всегда С > 0. Если в общем случае ток есть производная электрического заряда по времени (см. (1.1)), то протекающий по емкости ток определится в виде
тогда напряжение на емкости составит
Анализ выражений (1.18) и (1.19) позволяет заключить, что под действием внешних факторов ток в емкости может изменяться мгновенно, а изменение напряжения при этом будет происходить в течение некоторого времени. Источником энергии в электрических цепях являются источники э.д.с. и источники тока. Идеальный источник э.д.с. представляет собой активный элемент с двумя выводами, напряжение на которых не зависит от тока, проходящего через него. Предполагается, что внутри такого идеального источника рассмотренные выше элементы R, L, C отсутствуют и поэтому прохождение тока не вызывает на нем падения напряжения. Вольт-амперная характеристика идеального источника э.д.с приведена на рис. 1.3, а, прямая 1. В действительности же реальные источники электрической энергии обладают как внутренним сопротивлением, так и индуктивностью, а их вольт-амперная характеристика имеет вид прямой 2 (рис.1.3, а). Источник тока представляет собой элемент, ток которого не зависит от напряжения на его выводах. На рис. 1.3, б приведена вольт-амперная характеристика идеального 1 и реального 2 источников тока. В преобразователях электроприводов широкое применение также находят нелинейные компоненты – диоды, тиристоры и мощные транзисторы. На рис. 1.4 приведены условные обозначения этих компонентов и отражающие их основные свойства вольт-амперные характеристики. Диодами называют двухэлектродные компоненты электрической цепи, обладающие односторонней проводимостью. Величина внутреннего сопротивления диода зависит от полярности напряжения, приложенного к его электродам. На прямой ветви (рис. 1.4, а) внутреннее сопротивление диода будет мало, на обратной – наоборот, велико. Иначе говоря, в прямом направлении диод пропускает электрический ток, а в обратном нет.
Рис. 1.4. Вольт-амперные характеристики диода (а), тиристора (б) и силового транзистора (в)
Основным недостатком диода, ограничивающим его применение в силовых электронных преобразователях, является невозможность управлением моментами включения и выключения – открытия и закрытия. Частично этот недостаток решен в полууправляемом силовом компоненте – тиристоре, вольт-амперная характеристика которого приведена на рис. 1.4, б. Включение тиристора осуществляется подачей импульса на управляющий электрод и только при условии наличия прямого напряжения на его силовых электродах. Выключение же происходит исключительно при изменении полярности напряжения на последних. На рис. 1.4, в приведена вольт-амперная характеристика силового транзистора. Транзистор является полностью управляемым прибором и позволяет осуществлять коммутацию цепей вне зависимости от величины напряжения на его электродах путем подачи, либо снятия импульса с управляемого электрода. В электротехнике основными законами электрических цепей наряду с законом Ома являются законы баланса токов в узле – первый закон Кирхгофа и баланса напряжений в замкнутых участках цепи – второй закон Кирхгофа. На рис. 1.5, а показан электрический узел, а на рис. 1.5, б – электрический контур. Первый закон Кирхгофа гласит: “а лгебраическая сумма токов в узле равна нулю”
или для узла на рис. 1.5, а
Первый закон Кирхгофа выражает тот факт, что в узле электрический заряд не накапливается и не расходуется. Второй закон Кирхгофа – “ алгебраическая сумма э.д.с. в любом контуре цепи равна алгебраической сумме падений напряжений на элементах этого контура ”
или для контура на рис. 1.5, б может быть записан в виде
Двигатель постоянного тока Принцип действия двигателя постоянного тока может быть пояснен на примере работы простейшей одновитковой машины (рис. 1.8). При подключении обмотки якоря к источнику постоянного напряжения
направление которой определяется по правилу “левой руки” (см. рис. 1.9). Эти силы создают механический момент, называемый электромагнитным моментом
или с учетом (1.25)
В выражениях (1.25)-(1.27): Электромагнитный момент приведет вращающуюся часть двигателя в движение. При этом проводники обмотки будут также вращаться в магнитном поле, а следовательно в них будет индуцироваться электродвижущая сила (э.д.с.). Направление э.д.с. определяется по правилу “правой руки” (см. рис. 1.9). Мгновенное значение индуцируемой в проводнике обмотки э.д.с определится по закону электромагнитной индукции в виде
где
При повороте обмотки якоря более чем на 90° от исходного положения его верхний проводник окажется под южным полюсом. Одновременно с этим из-за действия коллектора направление тока в нем также изменится, а следовательно направление электромагнитного момента, вызывающее вращение двигателя останется неизменным. Двигатель продолжит вращаться в прежнюю сторону. Исходя из вышесказанного, напряжение на зажимах двигателя уравновешивается э.д.с. и падением напряжения на обмотке якоря
Развиваемый двигателем электромагнитный момент расходуется на преодоление механических потерь в подшипниках якоря двигателя и рабочего органа
Динамический момент может быть определен по выражению
где Анализ зависимости (1.32) показывает, что
Приняв, что
Подставив (1.34) и (1.35) в (1.30) получим уравнение электромеханической характеристики ДПТ
и уравнение его механической характеристики
Синхронный двигатель Синхронным двигателем называют двухобмоточную электрическую машину переменного тока, на одну из обмоток которой подается переменное напряжение частотой f, а на другую – постоянное напряжение. Статор (неподвижная часть) синхронной машины имеет такое же устройство, как и статор асинхронной машины. Подвижная часть, состоящая из сердечника с уложенной в нем токопроводящей обмоткой, носит название якоря. Конструкция якоря синхронной машины может быть как явнополюсная (рис. 1.16, а), так и неявнополюсная (рис. 1.16, б). Как и в асинхронном двигателе, обмотка статора синхронной Механические характеристики синхронного двигателя приведены на рис. 1.17. Вращение якоря происходит синхронно со скоростью вращения потока статора во всем диапазоне допустимых нагрузок на валу двигателя
С учетом, что
Благодаря именно этому факту машина и получила название синхронного двигателя. Регулирование скорости синхронного двигателя также как и асинхронного осуществляют путем изменения частоты питающего обмотки статора напряжения. Чем ниже частота, тем меньше скорость вращения якоря.
Линейный электродвигатель Линейный двигатель реализует поступательное движение независимого звена – ротора. Передача энергии осуществляется между статором и этим независимым звеном посредством электромагнитного поля через воздушный зазор. Понимание принципа работы линейного двигателя может быть пояснено следующим условным преобразованием конструкции двигателя углового вращения (см. рис. 1.20). В результате продольного разреза статора и ротора (рис. 1.20, б) и их развертки в прямую линию (рис. 1.20, в) угловое движение преобразуется в линейное движение уже “независимого” ротора, т.е. становится поступательным. Можно также осуществить и обратную свертку двигателя (рис. 1.20, г) только уже относительно его поперечной оси, что приведет к появлению линейного двигателя другого типа. Таким образом, любой линейный двигатель состоит из двух основных элементов – неподвижного электромагнитного статора и независимого подвижного ротора. Для увеличения мощности на один рабочий орган может устанавливаться несколько линейных двигателей. Основными достоинствами систем с линейными двигателями являются: - максимально высокие показатели точности (до 0,01 мкм) и повторяемости; - способность создавать большие подающие усилия (до 50 кН) и, как следствие этого, возможность развивать значительные ускорения (до 20·g), в том числе и под нагрузкой; - компактность, легкость и надежность конструкции исполнительного привода в целом (отсутствуют преобразователи движения и прочие механические элементы); - низкие уровни шума и вибрации; - удобство монтажа и простота в обслуживании. Для управления линейными двигателями используют преобразователи частоты. Основные понятия и законы гидравлики Основным законом гидростатики (учения о системах с неподвижной жидкостью) является закон Паскаля (см. рис. 2.2): “ Воздействие силы на неподвижную жидкость распространяется по всем направлениям внутри этой жидкости. Величина давления жидкости равна нагрузке, соотнесенной с площадью на которую она действует
Давление оказывает свое воздействие всегда вертикально на ограничивающую поверхность резервуара ”.
т.е. отношение сил равно отношению площадей. Перемещение S1 и S2 обоих поршней (при пренебрежении силами трения в жидкости и допущении что жидкость не сжимается) обратно пропорционально их площадям
а работа силового поршня равна работе нагрузочного поршня
Учение о законах движения жидкости и действующих при этом силах называется гидрокинетикой. Если через трубопровод с различными сечениями проходит одинаковый объем жидкости, то скорость потока в наиболее узком месте должна возрастать. Иначе, поток (расход жидкости через трубопровод) равен произведению площади проходного сечения А на скорость течения жидкости V
Откуда можно записать уравнение непрерывности потока в виде (см. рис. 2.4)
В гидрокинетике закон сохранения энергии гласит, что “ общая энергия потока жидкости не изменяется до тех пор, пока не будет осуществлен подвод энергии извне, или пока энергия не будет отдаваться наружу системы ” и может быть записан в виде уравнения Бернулли
где g – ускорение свободного падения, для Земли g = 9,81 м/с2; Совместное рассмотрение уравнений непрерывности (2.6) и Бернулли (2.7) позволяет сделать следующие выводы. Если из-за уменьшения проходного сечения увеличивается скорость, то кинетическая энергия возрастает. Так как полная энергия гидравлической системы неизменна, то потенциальная энергия и/или давление должны уменьшаться. Поскольку потенциальная энергия в случае только сужения сечения практически не изменяется, то существенно изменяется статическое давление. Иначе, изменение давления обратно пропорционально изменению проходного сечения. Передача гидравлической энергии всегда сопровождается потерями. Так на стенках трубопровода и в самой жидкости возникает трение, переходящее в тепло. Возникающие при этом потери гидравлической энергии вызывают в системах потери давления (см. рис. 2.5), зависящие от длины, проходного сечения, формы и шероховатости стенок трубопровода, скорости потока и вязкости жидкости.
Гидроцилиндры В настоящее время гидроцилиндры являются наиболее распространенными агрегатами для преобразования гидравлической энергии в механическую поступательного движения. По принципу действия гидроцилиндры бывают одностороннего (рис. 2.7, а, б) и двухстороннего (рис. 2.7, в, г) действия. Гидроцилиндры одностороннего действия могут передавать усилие только в одном направлении. При подводе рабочего давления (см. рис. 2.7, а) через отверстие х сила F1, действующая на поршень, будет направлена в сторону выдвижения. Если эта сила окажется больше силы сопротивления Fнагр, то поршень придет в движение. Возврат в исходное положение обеспечивается либо пружиной, либо в случае ее отсутствия под воздействием внешней силы. Изменение направления силы может быть достигнуто за счет подвода рабочего давления через линию y (см. рис. 2.7, б). В этом случае за счет давления жидкости F2 будет происходить втягивание поршня, а его возврат будет осуществляться пружиной и/или внешней силой.
Усилия, развиваемые штоком гидроцилиндра при его выдвижении F1 и втягивании F2, могут быть определены по зависимости (2.1) как
Рассмотренные принципы действия гидроцилиндров реализованы в различных конструктивных исполнениях гидроприводов мехатронных устройств, определяемых, прежде всего, целями их применения.
Поворотные гидроцилиндры Независимо от типа конструкции поворотные гидроцилиндры осуществляют движение в
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-26; просмотров: 1073; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.217.39 (0.018 с.) |

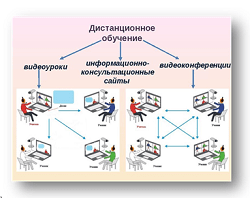
 Бурное развитие электротехники, электроники и информационных технологий в последние десятилетия ХХ века привело к замещению во многих областях техники механических систем на мехатронные системы. При этом часть функциональной нагрузки было перенесено от механических узлов к интеллектуальным компонентам (электронным и информационным). Так по данным материалов всемирной выставки “Промышленность, автоматизация и инновации”, 2000 г. доля технологических функций, выполняемых механической частью оборудования сократилась с 90 % в 1970 году до 40 % в 2000 году (см. рис. В.1). При этом информационная доля только за последнее десятилетие возросла вдвое, и по прогнозу экспертов подобная тенденция в ближайшие годы будет сохранена.
Бурное развитие электротехники, электроники и информационных технологий в последние десятилетия ХХ века привело к замещению во многих областях техники механических систем на мехатронные системы. При этом часть функциональной нагрузки было перенесено от механических узлов к интеллектуальным компонентам (электронным и информационным). Так по данным материалов всемирной выставки “Промышленность, автоматизация и инновации”, 2000 г. доля технологических функций, выполняемых механической частью оборудования сократилась с 90 % в 1970 году до 40 % в 2000 году (см. рис. В.1). При этом информационная доля только за последнее десятилетие возросла вдвое, и по прогнозу экспертов подобная тенденция в ближайшие годы будет сохранена. Заложенная в этом определении триединая сущность мехатронных систем – глубокая взаимосвязь механических (в том числе гидравлических и пневматических), электротехнических компонентов и системы автоматизации (интеллектуального управления) может быть проиллюстрирована рис. В.2. Главная методологическая идея мехатроники состоит в системном сочетании ранее обособленных научно-технических направлений с целью создания новых устройств, обладающих высокими функциональными качествами, конструктивной компактностью, высокой надежностью и долговечностью.
Заложенная в этом определении триединая сущность мехатронных систем – глубокая взаимосвязь механических (в том числе гидравлических и пневматических), электротехнических компонентов и системы автоматизации (интеллектуального управления) может быть проиллюстрирована рис. В.2. Главная методологическая идея мехатроники состоит в системном сочетании ранее обособленных научно-технических направлений с целью создания новых устройств, обладающих высокими функциональными качествами, конструктивной компактностью, высокой надежностью и долговечностью.
 , (1.1)
, (1.1) (1.2)
(1.2) . (1.3)
. (1.3) , (1.4)
, (1.4) . (1.5)
. (1.5)
 (1.6)
(1.6) электрических градусов:
электрических градусов: (1.7)
(1.7) ,
,  . (1.8)
. (1.8)
 , (1.9)
, (1.9) . (1.10)
. (1.10) . (1.11)
. (1.11) . (1.12)
. (1.12) . (1.13)
. (1.13) . (1.14)
. (1.14) (1.15)
(1.15) . (1.16)
. (1.16) . (1.17)
. (1.17) , (1.18)
, (1.18) . (1.19)
. (1.19)


 (1.20)
(1.20) . (1.21)
. (1.21) , (1.22)
, (1.22) . (1.23)
. (1.23) в ней будет протекать электрический ток, величина которого согласно закону Ома обратно пропорциональна сопротивлению этой обмотки
в ней будет протекать электрический ток, величина которого согласно закону Ома обратно пропорциональна сопротивлению этой обмотки 
 . (1.24)
. (1.24) Конструкция машины такова, что обмотка якоря находится в магнитном поле, создаваемом постоянными магнитами. Известно, что на проводник с током, размещенным в магнитном поле, действует электромагнитная сила
Конструкция машины такова, что обмотка якоря находится в магнитном поле, создаваемом постоянными магнитами. Известно, что на проводник с током, размещенным в магнитном поле, действует электромагнитная сила , (1.25)
, (1.25) (1.26)
(1.26) . (1.27)
. (1.27) – магнитная индукция в воздушном зазоре между полюсом и якорем в месте расположения проводника;
– магнитная индукция в воздушном зазоре между полюсом и якорем в месте расположения проводника;  – активная длина проводника;
– активная длина проводника;  – диаметр якоря.
– диаметр якоря. , (1.28)
, (1.28) – линейная скорость движения проводника.
– линейная скорость движения проводника. Поскольку верхняя (см. рис. 1.8) часть обмотки якоря находится под северным полюсом магнита, а нижняя часть – под его южным полюсам, а также при условии разнонаправленности тока в них, полная э.д.с. одновитковой машины определится как
Поскольку верхняя (см. рис. 1.8) часть обмотки якоря находится под северным полюсом магнита, а нижняя часть – под его южным полюсам, а также при условии разнонаправленности тока в них, полная э.д.с. одновитковой машины определится как . (1.29)
. (1.29) . (1.30)
. (1.30) , на создание полезного момента нагрузки
, на создание полезного момента нагрузки  и на создание динамического момента, необходимого для разгона или торможения
и на создание динамического момента, необходимого для разгона или торможения 
 . (1.31)
. (1.31) , (1.32)
, (1.32) – суммарный момент инерции всех вращающихся частей мехатронного модуля, приведенный к валу двигателя.
– суммарный момент инерции всех вращающихся частей мехатронного модуля, приведенный к валу двигателя. при разгоне и
при разгоне и  при торможении. Также следует отметить, что в установившемся режиме работы
при торможении. Также следует отметить, что в установившемся режиме работы  , а момент двигателя равен статическому моменту
, а момент двигателя равен статическому моменту 
 . (1.33)
. (1.33) , где
, где  – конструктивная постоянная двигателя, а
– конструктивная постоянная двигателя, а  – его магнитный поток, выражения (1.27) и (1.29) можно переписать в виде
– его магнитный поток, выражения (1.27) и (1.29) можно переписать в виде , (1.34)
, (1.34) . (1.35)
. (1.35) (1.36)
(1.36) . (1.37)
. (1.37) На рис. 1.10 приведены механические характеристики двигателя постоянного тока независимого возбуждения, построенные в соответствии с выражением (1.37). Механическая характеристика двигателя, запитанного номинальным напряжением при номинальной величине магнитного потока называется естественной. Для управления скоростным режимом работы двигателя в мехатронных модулях, как правило, изменяют напряжение вниз от номинального значения. При этом согласно выражению (1.37) скорость двигателя уменьшается пропорционально снижению напряжения вплоть до нуля. В случае если полярность питающего напряжения будет изменена, то двигатель начнет вращаться в другую сторону. Таким образом, возможно задавать вращение двигателя в любом необходимом направлении.
На рис. 1.10 приведены механические характеристики двигателя постоянного тока независимого возбуждения, построенные в соответствии с выражением (1.37). Механическая характеристика двигателя, запитанного номинальным напряжением при номинальной величине магнитного потока называется естественной. Для управления скоростным режимом работы двигателя в мехатронных модулях, как правило, изменяют напряжение вниз от номинального значения. При этом согласно выражению (1.37) скорость двигателя уменьшается пропорционально снижению напряжения вплоть до нуля. В случае если полярность питающего напряжения будет изменена, то двигатель начнет вращаться в другую сторону. Таким образом, возможно задавать вращение двигателя в любом необходимом направлении. машины создает вращающееся магнитное поле. В результате взаимодействия этого поля с полем обмотки якоря возникает электромагнитный момент, под действием которого якорь и приводится во вращение.
машины создает вращающееся магнитное поле. В результате взаимодействия этого поля с полем обмотки якоря возникает электромагнитный момент, под действием которого якорь и приводится во вращение. ,
,  . (1.43)
. (1.43) , уравнение механической характеристики синхронного двигателя имеет вид
, уравнение механической характеристики синхронного двигателя имеет вид
 . (1.44)
. (1.44)
 . (2.1)
. (2.1) На рис. 2.3 приведен пример передачи силы. Если на площадь А1 действует сила F1, то возникающее при этом давление p оказывает воздействие на все точки системы, в том числе и на поверхность А2. Следовательно,
На рис. 2.3 приведен пример передачи силы. Если на площадь А1 действует сила F1, то возникающее при этом давление p оказывает воздействие на все точки системы, в том числе и на поверхность А2. Следовательно,
 или
или  , (2.2)
, (2.2) , (2.3)
, (2.3) . (2.4)
. (2.4) . (2.5)
. (2.5) . (2.6)
. (2.6)
 , (2.7)
, (2.7) – высота столба жидкости; ρ – плотность жидкости, кг/м3.
– высота столба жидкости; ρ – плотность жидкости, кг/м3. Гидроцилиндры двухстороннего действия имеют две рабочих поверхности одинакового или различного размера, могут иметь односторонний (рис. 2.7, в) или двухсторонний шток (рис. 2.7, г). Рабочее давление подводится через два независимых трубопровода x и y. Такие гидроцилиндры способны формировать усилия в обоих направлениях.
Гидроцилиндры двухстороннего действия имеют две рабочих поверхности одинакового или различного размера, могут иметь односторонний (рис. 2.7, в) или двухсторонний шток (рис. 2.7, г). Рабочее давление подводится через два независимых трубопровода x и y. Такие гидроцилиндры способны формировать усилия в обоих направлениях. ,
,  . (2.8)
. (2.8)